ご使用前にご確認ください
免責事項
推奨ブラウザ
ブロック線図
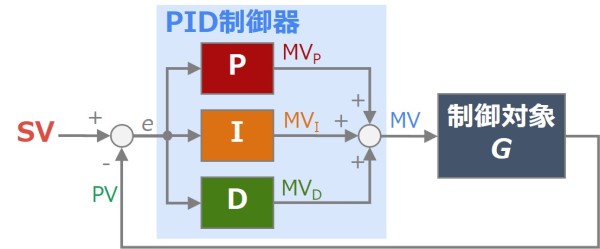
PID制御器の設定
\( \displaystyle MV(t) = \frac{100}{P} \left( e(t) + \frac{1}{T_I} \int e(t) \; dt + T_D \frac{d}{dt}e(t) \right) \)
\( e(t) = SV - PV(t) \)
| \( PV(t) \) | : | 制御対象の温度 [℃] | |
| \( MV(t) \) | : | 操作量 [%] | |
| \( SV \) | : | 設定値 [℃] | |
| \( P \) | : | 比例帯 [℃] | |
| \(T_I\) | : | 積分時間 [s] | |
| \(T_D\) | : | 微分時間 [s] | |
| \(\gamma\) | : | 微分ゲイン [-] | |
| リセットワインドアップ対策 | |||
制御対象の設定
詳細設定
\( \displaystyle G(s) = \frac{K_P}{(T_0 s + 1)(T_1 s + 1)(T_2 s + 1)} \)
| \(K_P\) | : | プロセスゲイン [℃/%] | |
| \(T_0\) | : | 時定数 [s] | |
| \(T_1\) | : | 時定数 [s] | |
| \(T_2\) | : | 時定数 [s] |
シミュレーション設定
| 終了時間 [s] | |
| プロットするデータ数 |