技術解説
PROTEM3 制御シミュレーション スタートガイド
第1章 はじめに
1.1 目的
弊社のシミュレーション・サービス目的は、パラメータ調整の労力削減やPID制御の教育等を想定しています。
主な特徴は、理化工業の標準的な制御アルゴリズムでシミュレーション可能であることです。なお、シミュレーションは実機動作を保証するものではありませんので、あくまでも目安としてご利用ください。
1.2 全体の流れ
シミュレーションを利用するには、制御対象のモデルが必要です。当サービスでは、実験データに基づいて対象モデルを作成します(モデリング)。シミュレーション上で大まかなパラメータ調整を行った後、実機にて最終的な確認・調整を行ってください。
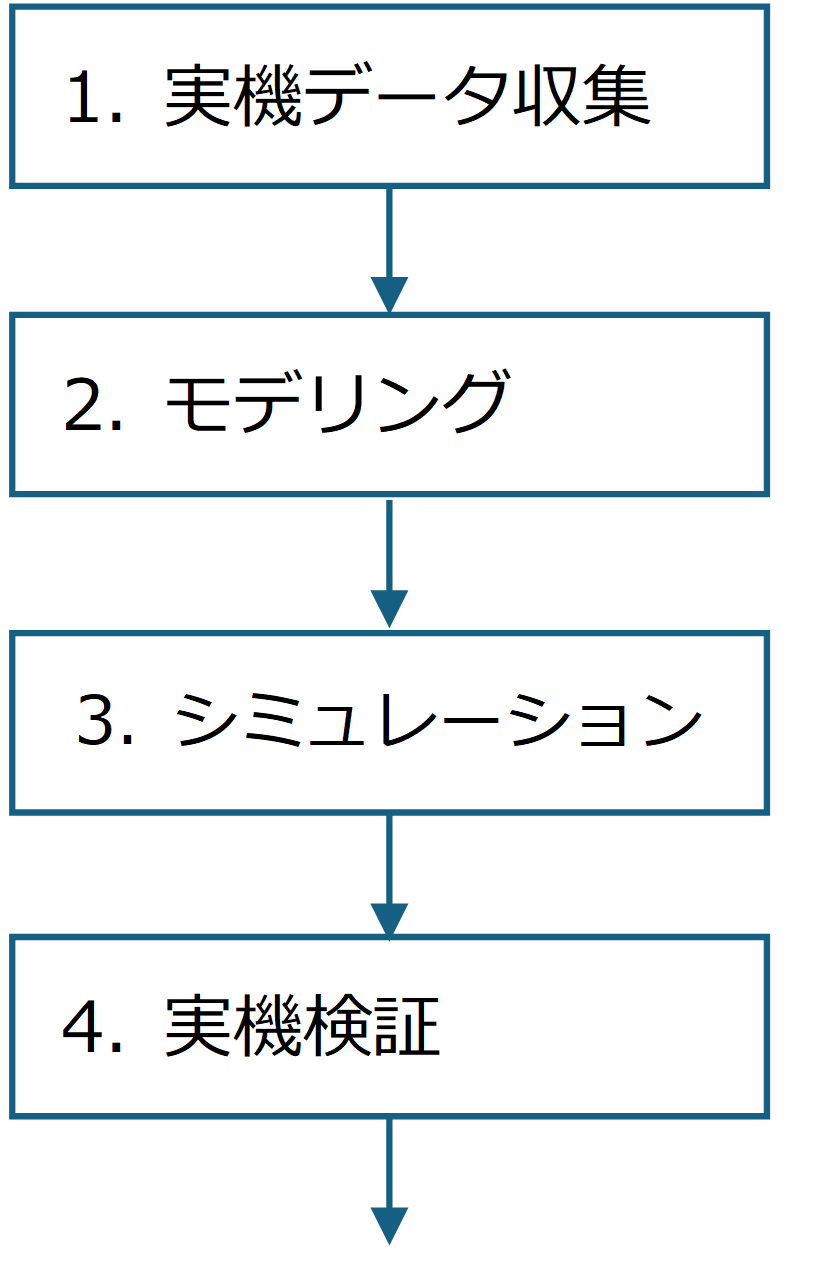
シミュレーションの流れ
※高精度なモデルの作成は、別途開発作業が必要となります。ご要望の際は、弊社の営業担当者、若しくは要素技術開発部までお問い合わせください。
第2章 モデリング(システム同定)
2.1 トレンドデータを取得する
制御対象をシステム同定するための試験データを用意します。ここではFZおよびPROTEMの利用を一例として、比較的簡便に実行可能なステップ応答実験を紹介します。マニュアル出力が無い場合は、室温から目標温度までの立ち上げも有効です。温度が安定した状態で開始してください。
<ステップ応答実験(FZ版)>
この実験では、(安定して収まるまでに要する時間)よりも長いステップ信号を対象に印加します。可能であれば、ステップ信号を複数個含む階段実験が有効です。
(1) ステップ信号を決める
予め、ステップ信号の印加により制御対象やヒータ等が損傷しないか、事前に確認してください。1つのステップ信号を作成するには、最低でも2つの操作出力値が必要です。
例)U0 = 0.0% … 温調停止時の操作出力値
U1= 50.0% … 目標温度で安定している時の操作出力値

ステップ信号のイメージ図
(2) ロギング設定
PROTEMのロギングツールを利用し、ペン設定で入出力データ(温度測定値(PV)、操作出力値(MV))を取得できる状態にします。
ここでは、入力1の測定値、入力1の操作出力値モニタを使用します。
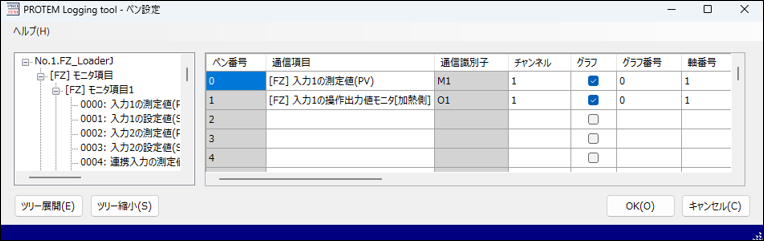
PROTEMロギングツールでのペン設定例
(3) 関連する設定項目
ロギング周期を安定させるため、ステップ応答取得時に操作する設定項目を右クリックで選択項目に追加しておきます(PROTEMに表示中の通信項目数に依存して通信周期が変動するため、ご注意ください)。
※型式によってはDI機能選択によりRUN/STOPが制限されるため、必要に応じて設定変更またはDIを切り替えます。
※出力変化率リミッタはOFFにしておきます。
※選択項目設定例
[運転切換モード] RUN/STOP切換
[運転切換モード]入力1のオート/マニュアル切換
[Sn51] 入力1のマニュアル操作出力値

PROTEMでの選択項目設定例
(4)ステップ応答を取得する
・初期出力(MV=U0)でPVを安定させる
下記設定を行い、入力1の測定値が安定するまで待ちます。
RUN/STOP切換 : 0 (RUN)
入力1のオート/マニュアル切換 : 1 (マニュアルモード)
入力1のマニュアル操作出力値 : U0
・ロギングを開始する
測定値が安定してから、ロギングを開始します。
・マニュアル操作出力値を変更する
マニュアル操作出力値を変更していきます。
入力1のマニュアル操作出力値 : U0→U1…UN-1→UN
操作出力値を変更した後、測定値が安定してから、次の操作出力値へ順次変更していきます。最後の操作出力値で測定値が安定したら、ロギングを停止します。
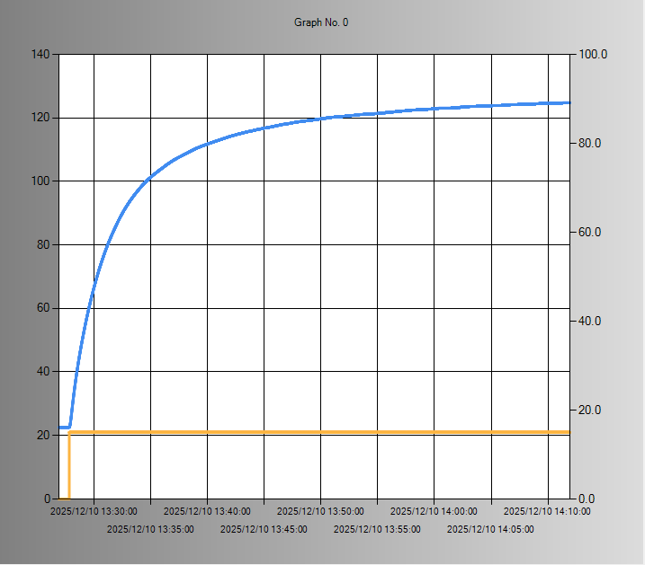
ステップ応答のロギング例 (MV=0% → MV=15%に変化させた場合)
2.2 モデリング用の設定データを作成する
PIDシミュレータ設定ツールを利用し、必要なファイルを生成します。
(1) 非線形成分を除外する
非線形成分とは、入力と出力の関係が「比例・加算ルール(重ね合わせの原理)」に従わない部分のことを指します。
例えば、出力飽和による物理的に無効な範囲を除外します。
例) リレー出力・SSR出力の場合
実際の出力リミッタを考慮して下記範囲内で指定します。
[0%≦MV下限値]、[MV上限値≦100%]

設定ツールでのMV上限・下限値設定例
(2) 必要に応じてモデル次数を手動設定する
モデル次数自動設定で同定精度が悪い場合は、手動設定を検討します。この際、「(分子次数)<(分母次数)」となるように設定します。

設定ツールでの次数設定例 ※モデル次数設定=FALSEを選択する
2.3 PIDシミュレータへモデリングを要求する
件名に”mod”を記載し、設定ツールから出力される下記ファイルを[所定のメールアドレス]へ送ります。
| modSet.csv | モデリング用設定ファイル |
| modData.csv | モデリング用トレンドデータ |
2.4 モデリング結果を取得
返信メールには下記が添付されています。
| modInfo.csv | モデル情報 ※シミュレーション実行時はこのファイルを使います |
| preview.html | 以下のグラフを含みます |
(1)トレンドデータ
システム同定の前処理前後の比較グラフです。前処理結果が意図した通りになっているか、確認できます。
(2)バリデーション結果
MVに対するPVの比較グラフ(トレンドデータ vs モデルデータ)です。波形が一致している程、対象の特徴を良く抽出できています。
(3)フィルタ出力
バターワースフィルタ処理結果のグラフです。
(4)ステップ応答
単位ステップ入力(MV=1.0[%])に対する応答です。正常なモデルであれば、漸近的に収束する応答が得られます。
下記の場合は、モデリング設定(上記1.2項)や同定入力等を見直します。
・バリデーション結果が著しく一致しない
・モデル情報の係数にマイナス(-)符号が含まれる
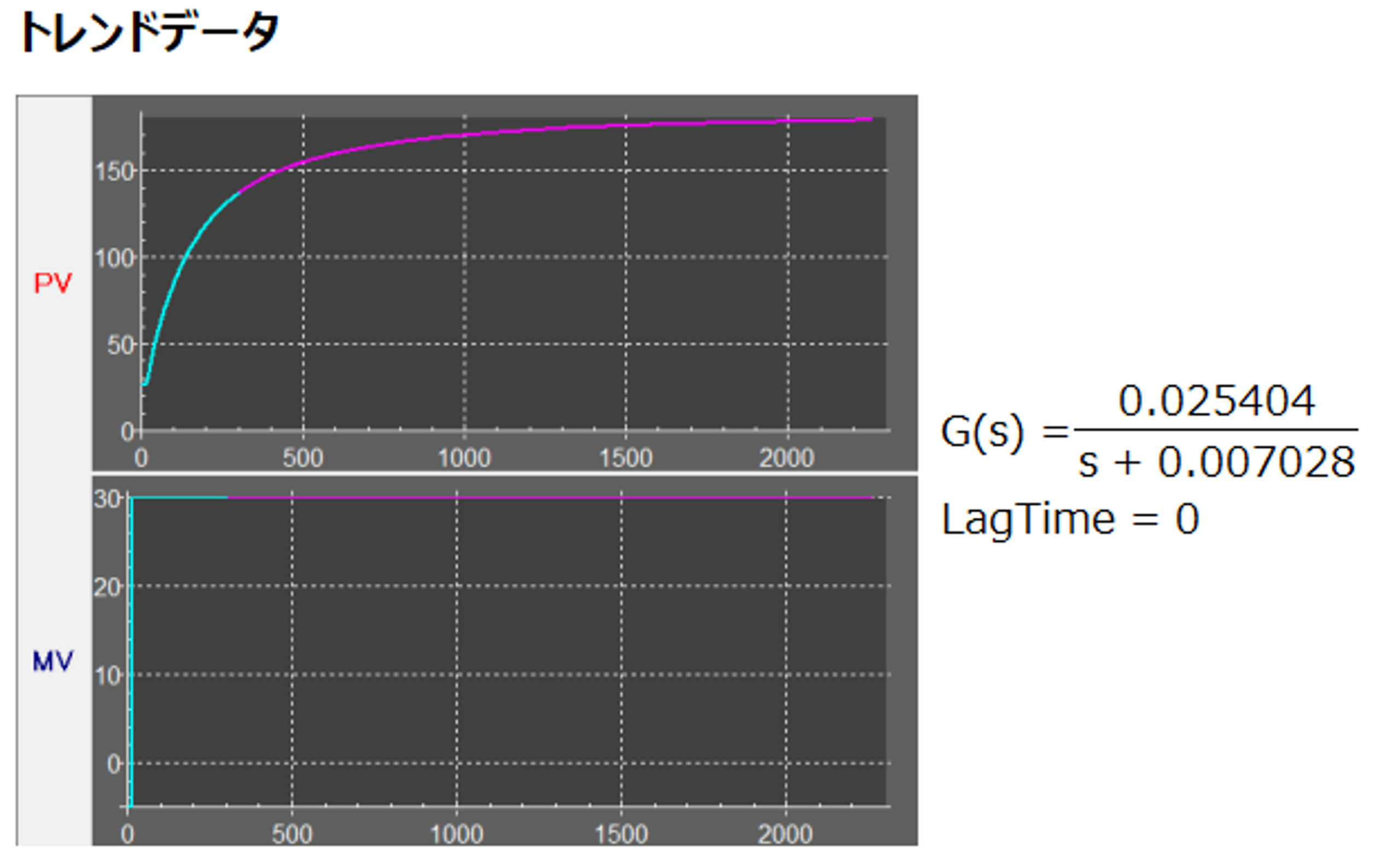
トレンドデータのモデリング結果例
第3章 制御シミュレーション
3.1 シミュレーション設定データを作成する
PIDシミュレータ設定ツールを利用し、必要なファイルを生成します。
・モード(AUTO/MAN/AT)
ATで調整したPID設定で制御シミュレーションしたい場合、制御シミュレーションを2回実行する必要があります。(1回目:AT、2回目:AUTO)
| AUTO | PID演算を行います。 |
| MAN | マニュアル出力値による制御を行います。 |
| AT | PIDをチューニングします。 |
3.2 制御シミュレーションを要求する
件名に”sim”を記載し、設定ツールから出力されるファイルとモデリングで取得したモデル情報を[所定のメールアドレス]へ送ります。
| simSet.csv | シミュレーション用設定ファイル |
| modInfo.csv | モデル情報 ※モデル作成時の返信メールに添付されています |
3.3 制御シミュレーション結果を取得
返信メールには下記が添付されています。
※フォームが異なりますので、simResult.csv のファイル名だけを変更してsimSet.csvとして利用することはできません。
| simResult.csv | 設定(AT結果のPIDを含む)、シミュレーション結果(ログデータ) |
| preview.html | シミュレーション結果(グラフ) |
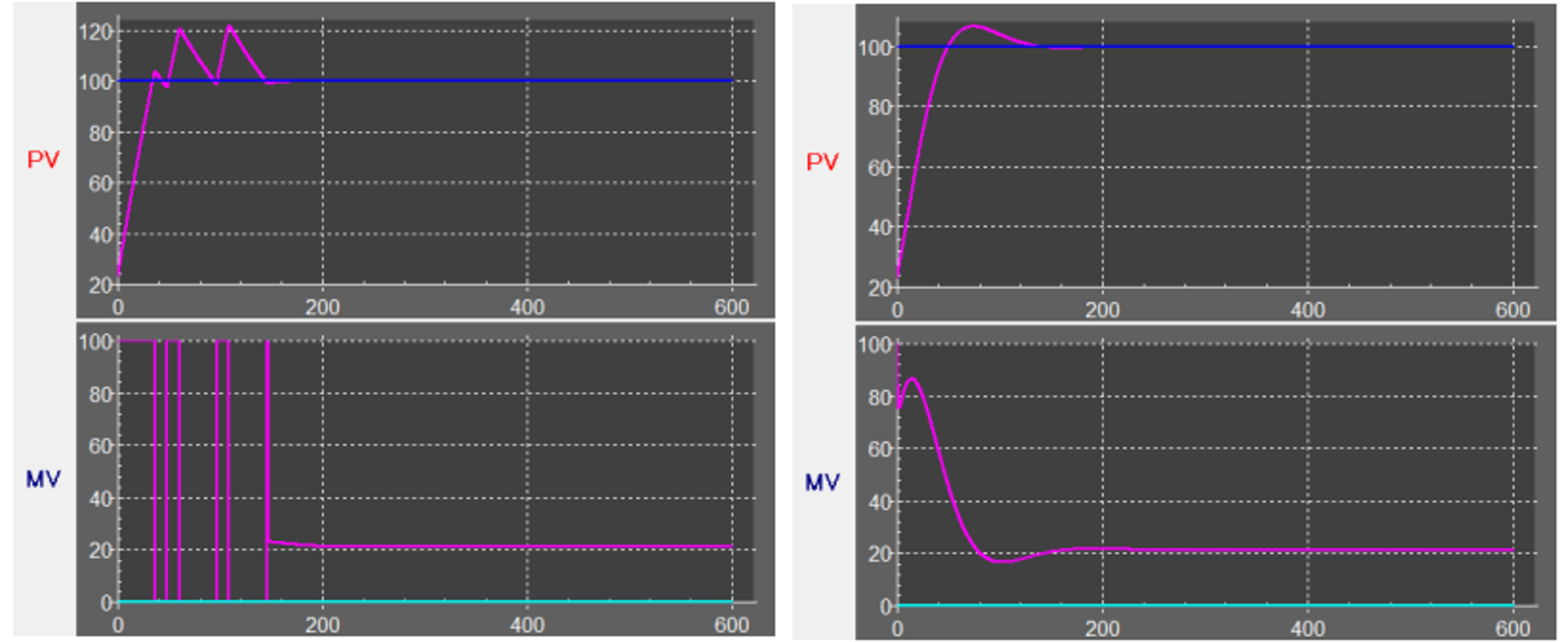
シミュレーション結果例 左側:オートチューニング 右側:PID制御
第4章 トラブルシューティング
| 現象 | 想定される原因 | 対策 |
|---|---|---|
| メール送信後、5分以上待ってもメールが返信されない |
・サービスが停止している |
サービスを利用することができません。詳細は弊社営業担当者までご連絡ください |
|
・サーバーが故障中 ・メンテナンス中 |
復旧までお待ちください | |
|
・メールが届いていない (迷惑メール扱いされている) ・利用登録が未完了 ・利用期間が終了している ・予期しないエラー |
弊社営業担当者までご連絡ください | |
| 返信メールの中身が空 | ・必要なファイルが無い |
添付しているファイル名をご確認ください (ファイル名は完全一致の必要があります) |
| ・予期しないエラー | 弊社営業担当者までご連絡の上、復旧までお待ちください | |
| エラー(タイムアウト) |
・設定データ(数値)に入力因子文字列等がセットされている ・実行時間が120秒を超過 |
設定データを見直してください |
■参考文献
(1) システム同定の基礎 (著者:足立修一、東京電機大学出版局)