
技术信息
POST 演算功能
热处理有各种各样的工艺要求,即使在自整定之后,还会有一些要求,比如希望响应速度再快一点,超调再小一点。在这种情况下,按照通常的 PID 调整方法就需要花费许多时间和精力。为此我们提案一种更简单的调整方法。
1.PID 参数的调整方法和问题
要满足热处理工艺要求,就需要设置适当的 PID 参数。通常利用自整定(AT)或者启动演算(ST)自动获得 PID 参数。这些方法获得的 PID 参数是对大多数控制对象通用的参数。如果希望响应速度再快一点,超调再小一点的话,就需要手动调整 PID 参数。
2.解决提案
为了得到希望的响应特性就需要调整 PID 参数。可是这 3 个参数相互影响,手动调整费时费力。在这种情况下请尝试使用 POST 演算(PT)功能。
POST 演算想法是,着眼于响应特性,将 PID 这 3 个参数转换成 1 个调整参数的方法。概念如图 1 所示。
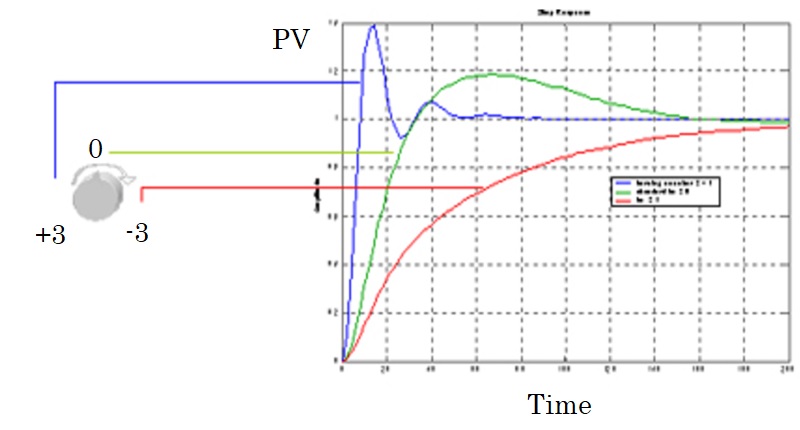
·如果旋钮向+方向旋转,响应速度加快…蓝线
·如果旋转向-方向旋转,响应速度变慢…红线
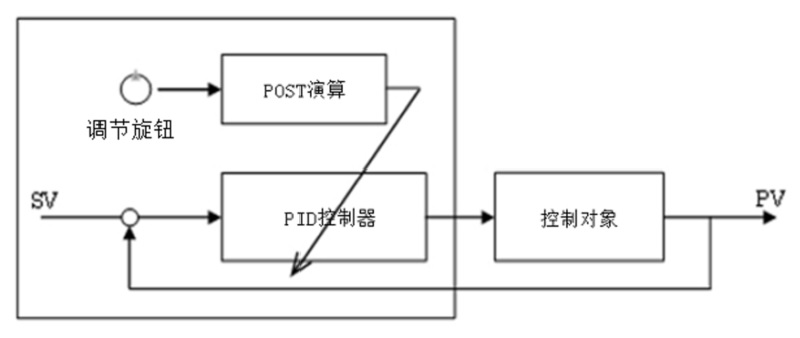
用户只需操作 1 个旋钮。PT 根据旋钮值自动计算 PID 参数,满足响应特性。PT 的原理如图 2 所示。
3.使用例
PT 是一个相对的调整方法。它是以据当前 PID 参数的响应特性为基准,调整 1 个旋钮来实现“响应速度稍快一点”,“响应速度稍慢一点”,“超调再小一点”的要求。下面是一个具体的使用例。
3.1 稍微改变一下当前的响应
AT 后的响应特性为基准,希望“响应速度稍微快一点”,“响应速度稍微慢一点”时,增减调整旋钮(Tc)值就可以实现,如图 3 所示。
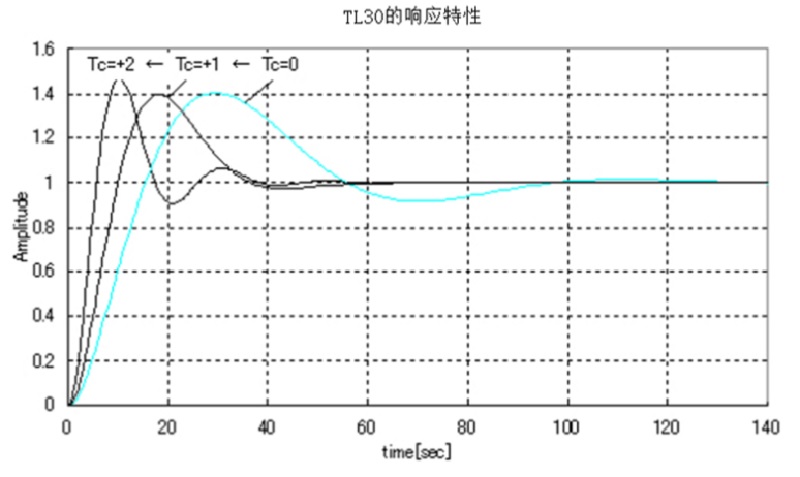
·向正方向调整,响应速度变快
·向负方向调整,响应速度变慢
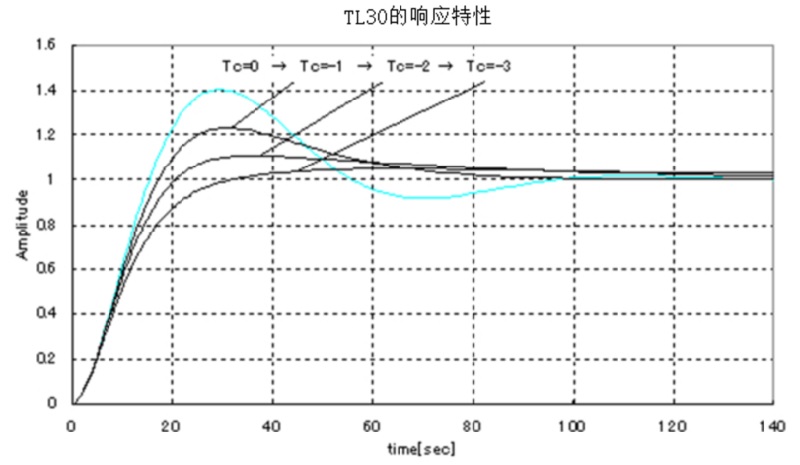
3.2 减小超调
PT 对抑制超调有效。向负方向调整 Tc,超调减少。如图 4 所示。
4.限制条件
PT 功能不改变 PID 参数。它是在 PID 参数的基础上做一些调整改变响应速度或者超调。因此 PT 有如下限制。
4.1 控制响应的改善程度受设置的 PID 参数限制。
如果 PID 参数设置的不恰当的话,可能得不到满意的效果。
4.2 如果 Tc 调整过度的话,可能会发生振动。
如果 PID 参数已经接近响应速度的上限时,再向正方形调整的话会出现振动。
4.3 P 控制,PI 控制和 PD 控制,PT 不起作用。
PT 功能可以容易改变控制响应,但不是万能的。请注意其局限性。希望 PT 能为您提高工作效率有帮助。
弊社温度控制器 RS,RH,RD 和 RB 系列安装有 POST 演算功能。
以上
咨询电话:RKC 营业技术部 (日本):+81-3-3755-6622 (北京时间 7:30-16:15)
咨询网页:https://www.rkcinst.co.jp/chinese/contact/