
技术信息
关于自整定功能与自我启动整定功能
为了实现在PID控制器中进行良好的控制,需要设置适应控制对象的,适当的PID参数。通常情况下,对PID参数进行调整被称为”整定”,在模拟控制器盛行的时代,操作员通常需要手动进行整定。然而,随着控制器从模拟式转变为数字式,适应控制对象的自动计算和设定PID参数的”自整定功能”(Auto-Tuning)被加入,近年来,还加入了更智能的整定功能。”自我启动整定功能”(Self-Tuning)也是为了进一步提升操作性能和性能而开发的一项功能,我们公司的调节器产品CB系列,SA100和SA200都具备这个功能。因此,在这里讲解一下自整定功能与自我启动整定功能之间的区别,并且进一步介绍一下CB系列、SA100和SA200产品中搭载的自我启动整定功能的特点和概要。本文中,将自整定功能简称为”AT”,将自我启动整定功能简称为”ST”。
1.“AT”与“ST”的区别
RKC的“AT”与“ST”的区别如下表所示。
| 自整定(AT) | 自我启动整定(ST) | |
| 基本动作 | ・通过ON/OFF控制的响应来计算,设定PID参数。 | ・无需特别的操作,控制器自身通过观测控制响应,将PID参数变更为适当的数值。 |
| 计算结果 | ・通过1次整定得到最适当的PID参数值。 | ・可能会出现通过1次整定不能收敛到最适当的PID参数值的情况。 |
| 整定的实施 | ・需要手动下达实施自整定的指令。 | ・通过控制器自动实施。 ・只有在控制状态发生变动(变更目标值,响应发生振动等)的情况下才会实施。 |
| 整定中的响应 | ・因为实施ON/OFF控制,会扰乱控制。 | ・无需实施ON/OFF控制,所以不会扰乱控制。 |
| 控制对象的特性发生变化时 | ・需要再次实施自整定。 | ・通过控制器自动计算和设定PID参数。 |
自我启动整定功能与自整定功能不同,通过观测通常的控制响应波形,自动计算和设定PID参数。
2.自我启动整定功能的特点
下面将介绍本公司自我启动整定功能的动作概述。
自我启动整定功能会在下述情况,日常运行时操作或控制状态不佳时自动执行,计算和设定PID参数。
◆[实施了接通电源/变更目标值/由STOP切换为RUN的操作]
◆[控制相应发生振动]
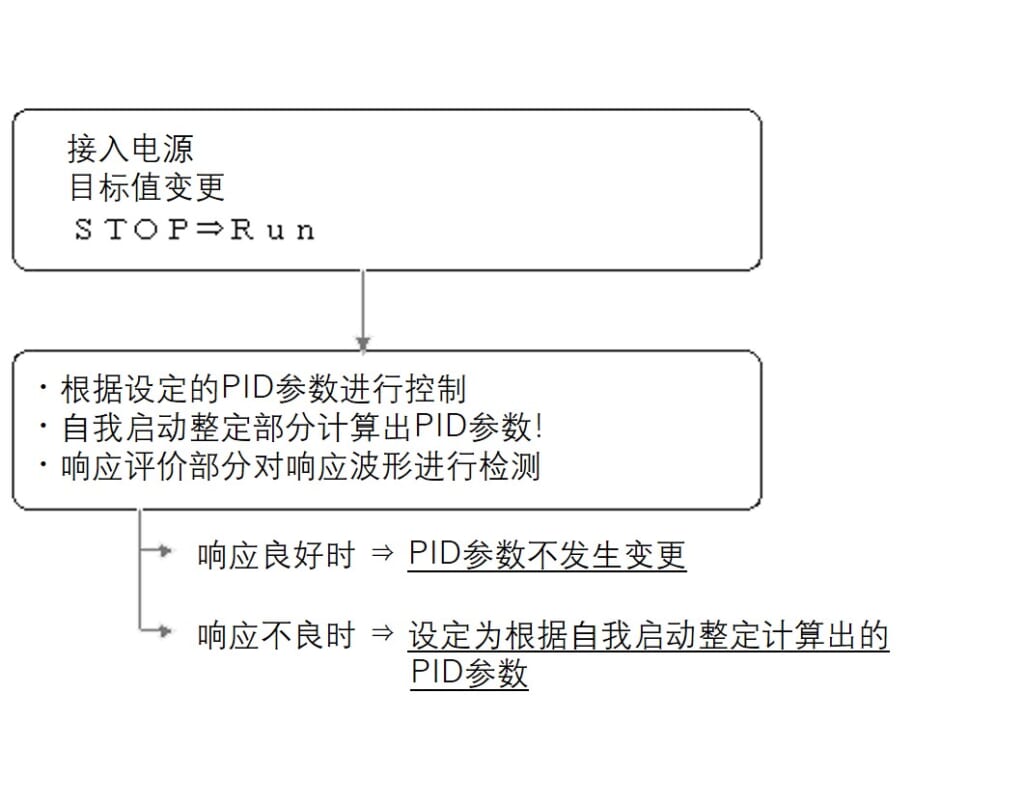
1)接通电源/更改目标值/由停止切换为RUN操作时的自我启动整定
通过观测接通电源/更改目标值/由停止切换为RUN操作时的目标值响应波形,自动计算PID参数。其特点是通过“波形观测处理”来评估目标值响应波形,并仅在响应不佳时设定计算出的PID参数。
(如果目标值响应波形良好,不会设置计算出的PID参数。)
因此,在更改目标值时的响应取决于更改目标值时设置的PID参数。
(当目标值响应不佳时,通过启动自整定,可以修正PID参数,在下次变更目标值时可以获得良好的目标值响应。)
• 关于通过自我启动整定计算PID参数
自我启动整定功能,通过从更改目标值或接入电源的时间点开始,到目标值安定为止的观测量的响应来计算PID参数。
计算出的PID参数,仅在响应对于目标值效果不佳时会被设定到控制器中。
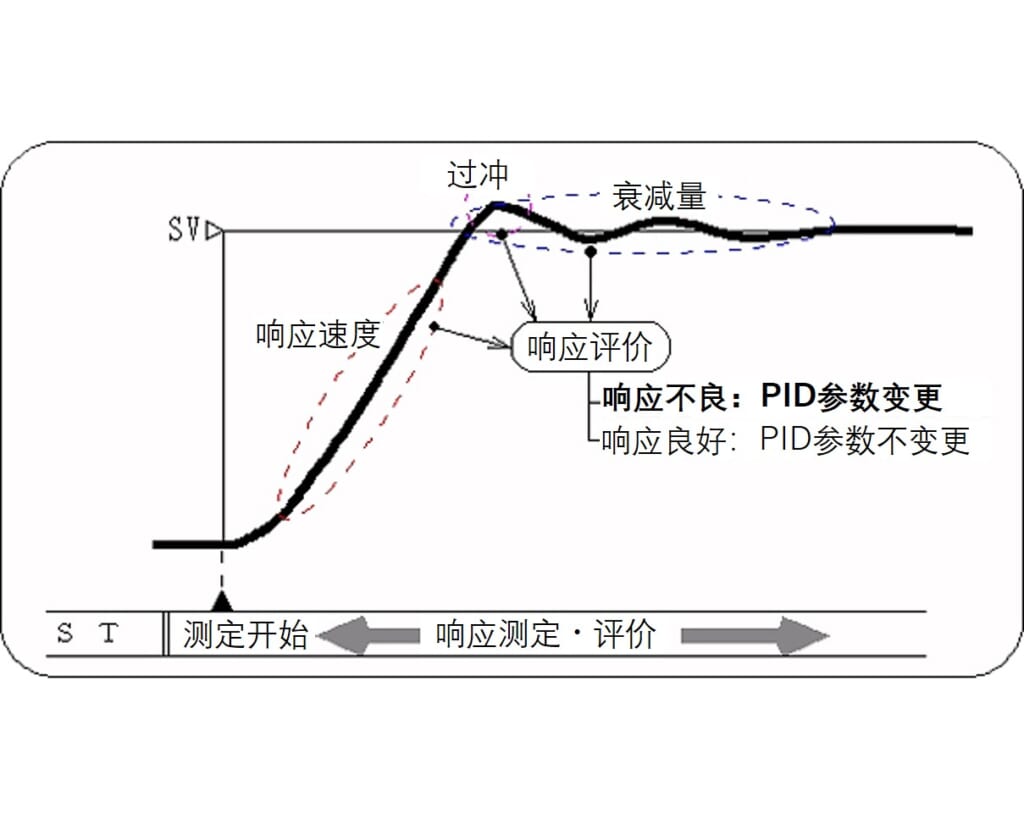
• 关于评估目标值响应
对“响应速度”“过冲”“衰减量”进行评估。
• 通过自我启动整定变更PID参数的时间点
响应评估的结果为“响应不良”时设定新的PID参数。
2)控制响应发生振动时的自我启动整定
由控制对象的特性变动或运行条件变化引起控制响应发生振动时,为了使振动收敛而自动修正PID参数的自我启动整定功能。
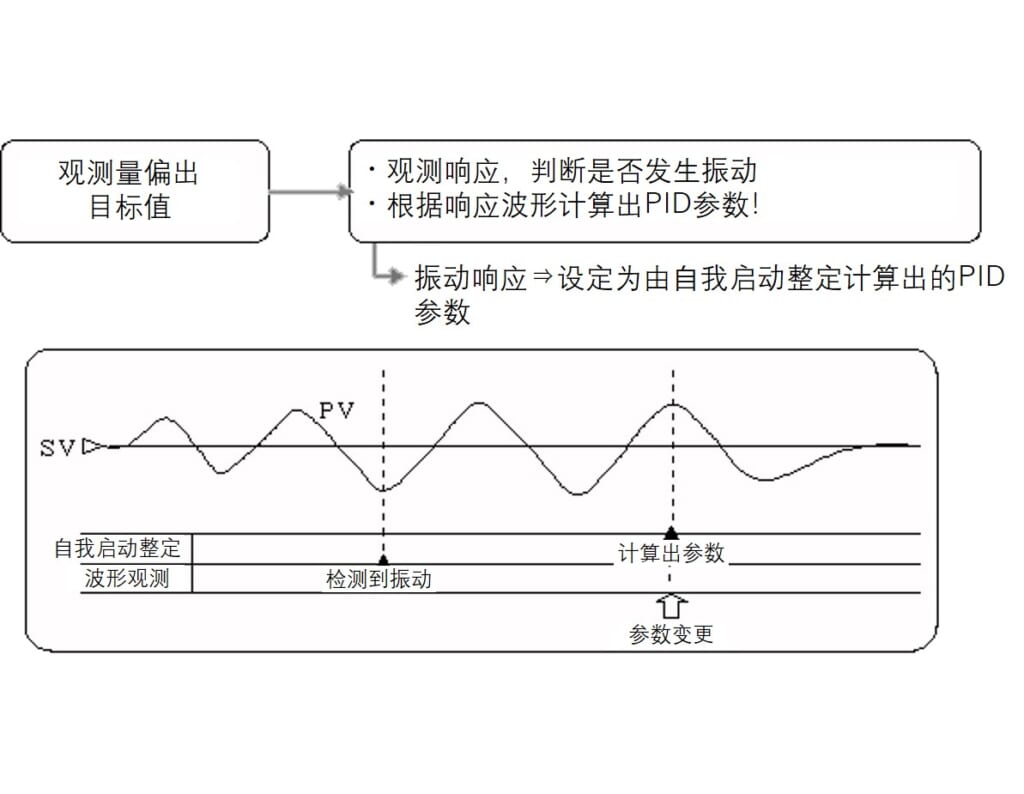
• 关于发生振动时由自我启动整定计算出的PID参数
自我启动整定功能根据观测量的响应波形(振动响应)计算PID参数。
• 发生振动时自我启动整定变更PID参数的时机
观测量发生持续振动,且振动的衰减率判断为不良时,将设定新的PID参数。
3.自我启动整定功能的使用注意事项
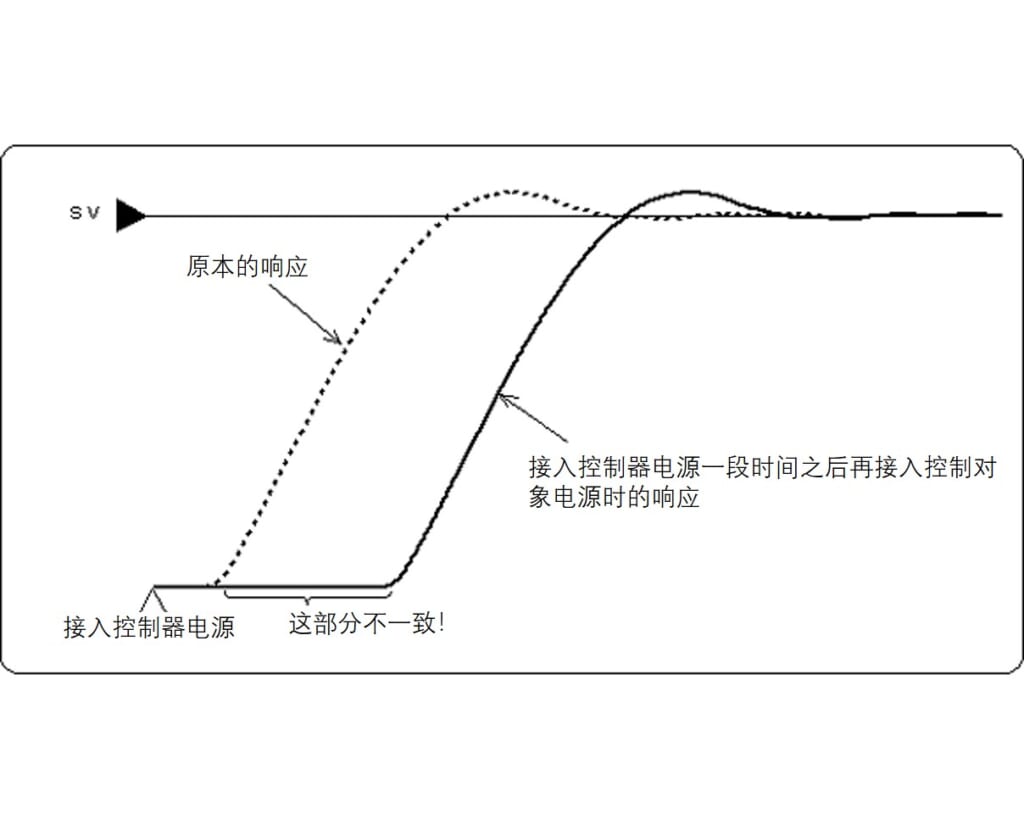
1)接入控制器的电源前,要先接入加热器等控制对象的电源。
「接入电源・更改目标值时」的自我启动整定功能,根据从目标值变更或接入电源实施后的时间点开始,到测量值安定在目标值为止的观测量响应,来计算出PID参数。
所以,在接入控制器电源前,没有事先接入加热器等控制对象的电源的情况下, [测定出的响应]と[原本的响应]会变得不一致,根据自我启动整定会有计算・设定出不适当的PID参数的情况发生。
2)控制对象为下述情况时,使用自我启动整定会有设定PID参数不适当的情况发生,请不要使用自我启动整定动能。
(1)有较大的扰乱(无法控制的扰乱)周期性的干扰控制对象
(例:注塑机模具的温度控制、半导体制造设备用热板的温度控制)
(2)相互干扰非常强烈的控制对象
但是,如果是挤出机料筒部分的温度控制等,相互干扰不是很大的控制对象的话,是可以使用自我启动整定功能的。
「振动时」的自我启动整定功能,在原因为PID参数的不匹配(P:小,I:小,D:大 等)所引起振动的情况时,会使PID参数的增益适当变缓和,以达到抑制振动的目的。
因此,对于受到如上述1、2等周期性干扰影响的扰乱,看似出现振荡的PID响应也会以相同的方式运行,最终导致通过自我启动整定进行调整的PID参数被缓和修正。
一般来说,为了抑制如上述1、2等情况的影响,需要更强烈的PID参数修正,因此,在振动时的自我启动整定中不会计算出这些条件下的最佳参数。
另外,根据上述条件开启自我启动整定功能的情况时,由于PID参数被设定的较为缓和,对目标值变更或扰乱的响应也会变得缓慢。
4.最后
CB系列、SA100和SA200等单回路控制器都配备了两种调整功能:“AT”和“ST”。
因此,CB系列、SA100和SA200等,可以使用“AT”来获得在设备启动时的第一次调整中得到良好的PID参数,然后使用“ST”来处理之后的特性变化。