
技术信息
反馈控制和前馈控制
1. 何为反馈控制
使用PID控制的控制器可以自动控制温度、流量、压力等期望的数值,这一点您可能已经了解。那么,
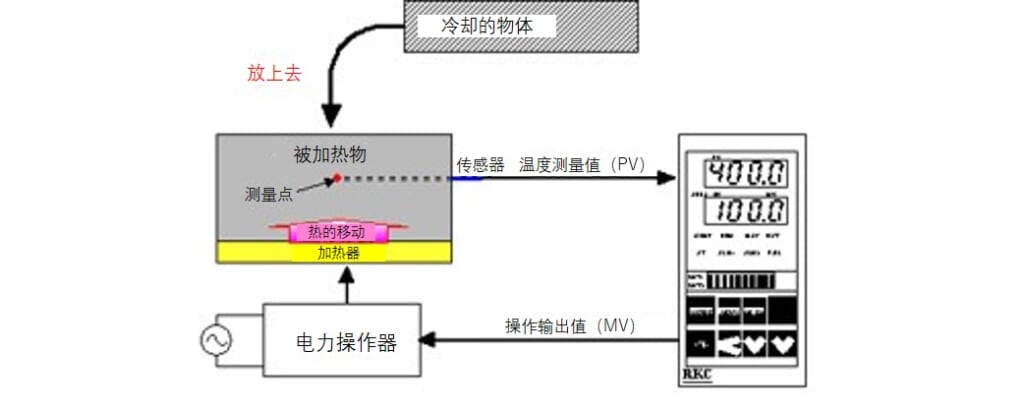
控制器是通过怎样的步骤来进行自动调节的呢?如图1所示,让我们以带有加热器的”被加热物”从”室温:
T0″控制到”某一温度:Tset”的情况为例来考虑。
将温度控制的对象称为”被加热物”,以下简称为”控制对象”。
为了测量控制对象的温度,我们在其内部嵌入了”温度传感器”,并提供了”电力操作器”和”温度控制
器”来为加热器提供电力,通过如图2所示的连接进行控制。
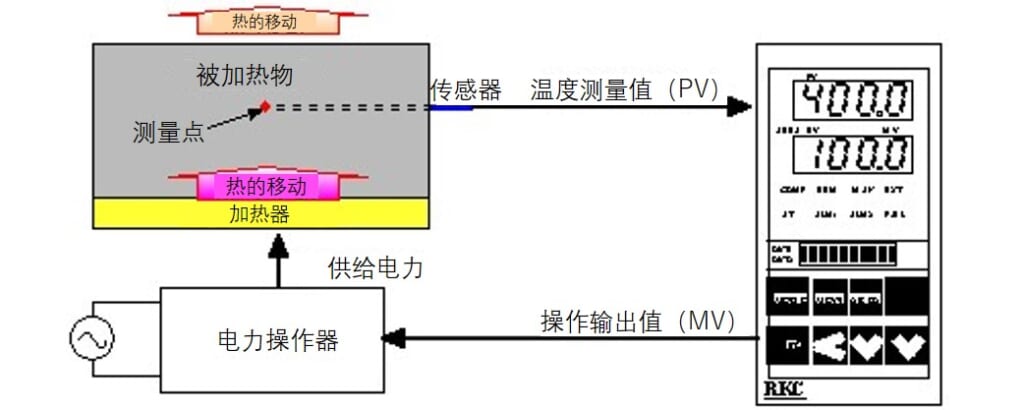
通过这种方式,温度控制器通过重复以下(1)到(4)的步骤来控制控制对象的温度,使其达到设定温度。
(1) 测量控制对象的温度:PV,并计算“PVT”与“设定温度:Tset”的温度差。
(2) 根据这个温度差,计算应该供给加热器的电力量,并将计算结果输出给电力操作器。
(3) 电力操作器根据温度控制器的输出值供应与之相应的电力给加热器。
(4) 通过供给电力给加热器,控制对象的温度发生变化。
这种”温度测量” → “控制运算” → “输出操作量(操作输出值)” → “温度变化” → “温度测量” → …
的封闭循环控制称为”闭环控制”,而在闭环中加入操作量(操作输出值)的结果所对应的”温度变化”的反馈则被称为”反馈控制(FB控制)”。
2.反馈控制的优点
上述的反馈控制是通过检测当前温度状态然后确定输出量来进行控制的方法。因此,例如:
• 控制对象突然受到风的吹拂
• 控制对象的性质略有变化
等等,即使有可能干扰控制的外部作用(扰动)发生,只要其影响以温度变化的形式显现出来,就可以立即进行反馈并进行适当的修正。
此外,通过巧妙设置闭环中的控制器的参数,还可以改善对控制对象设定温度的响应特性。
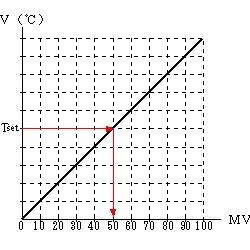
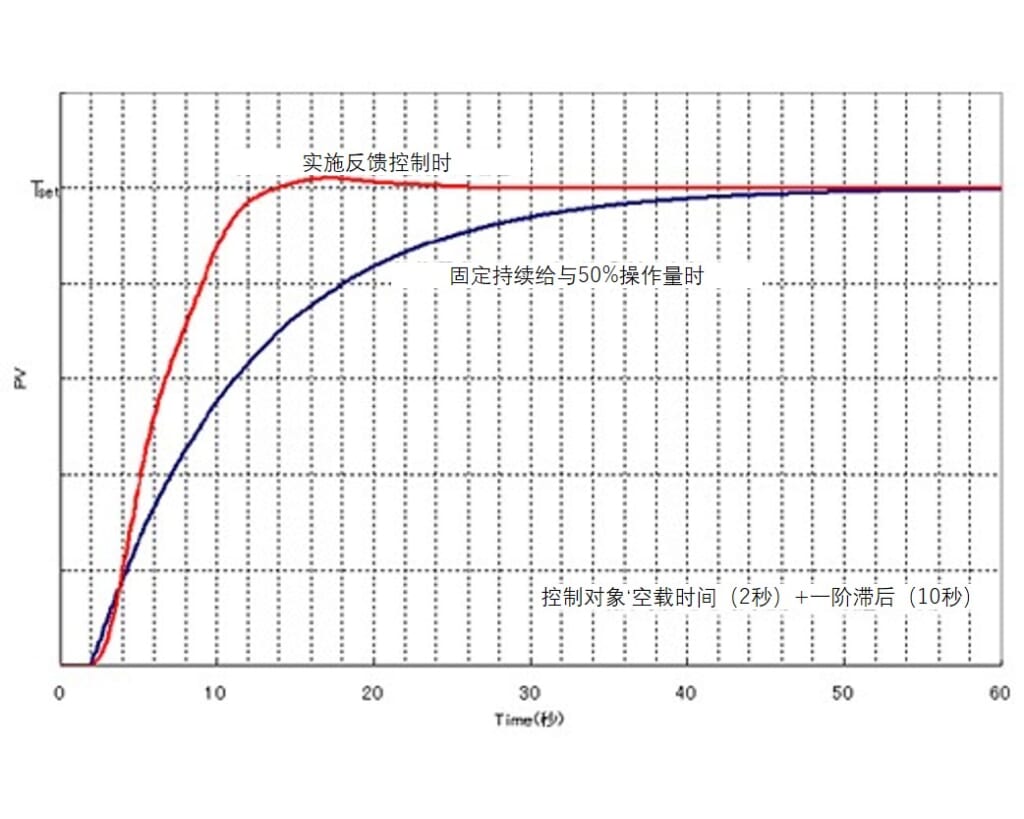
例如,如果控制对象的温度与电力供给量的关系如图3所示,那么为了使控制对象的温度达到Tset,只需提供50%的操作量即可实现(图4中的蓝色数据)。
那么,如果对这个控制对象进行反馈控制呢?
您可以看到,图4中的红色数据显示,“响应速度”和“达到Tset所需的时间”都得到了改善。
3.反馈控制的界限
即使如此优秀的反馈控制也有不足之处。反馈控制字面上的意思是“观察给定操作量的结果(进行反馈)然后修正”,因此,即使有可能干扰控制的各种外部因素发生,只有在其影响显现为温度变化时才能进行修正。
例如,“风吹来”或“控制对象的性质发生变化”等外部因素发生时,如果没有导致温度变化,就无法进行修正。因此,由于修正操作是事后进行的,一旦发生外部因素,就一定会受到其影响。
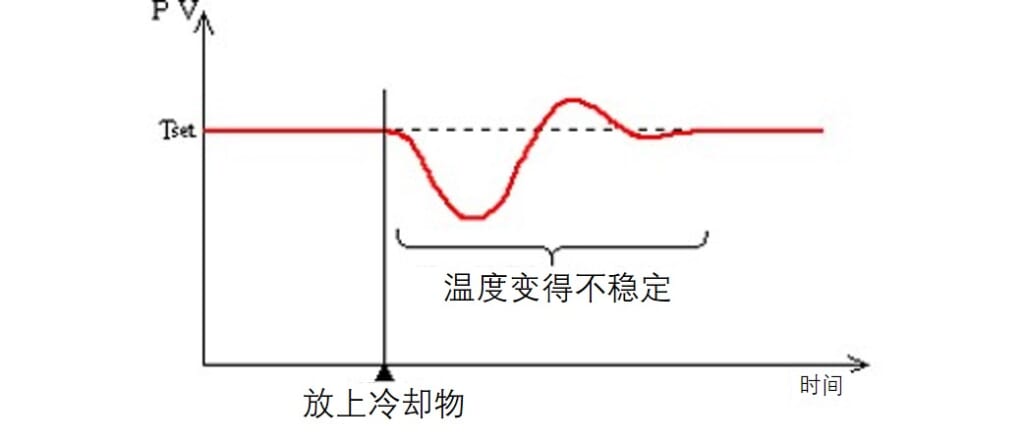
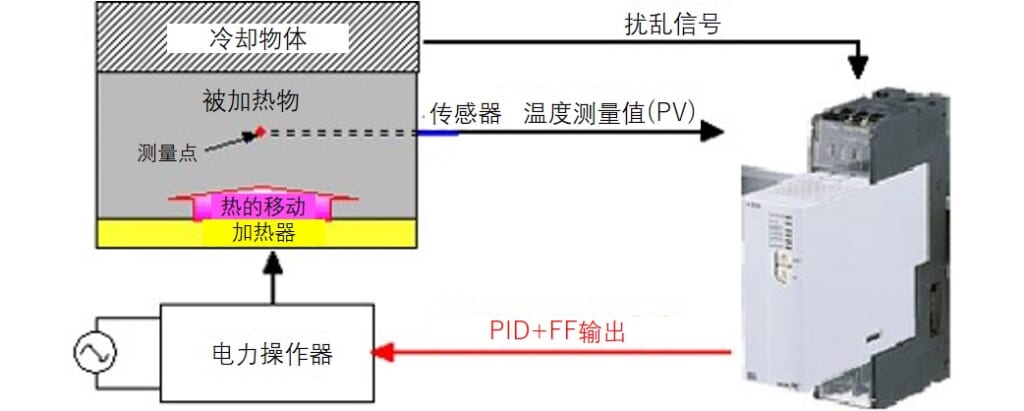
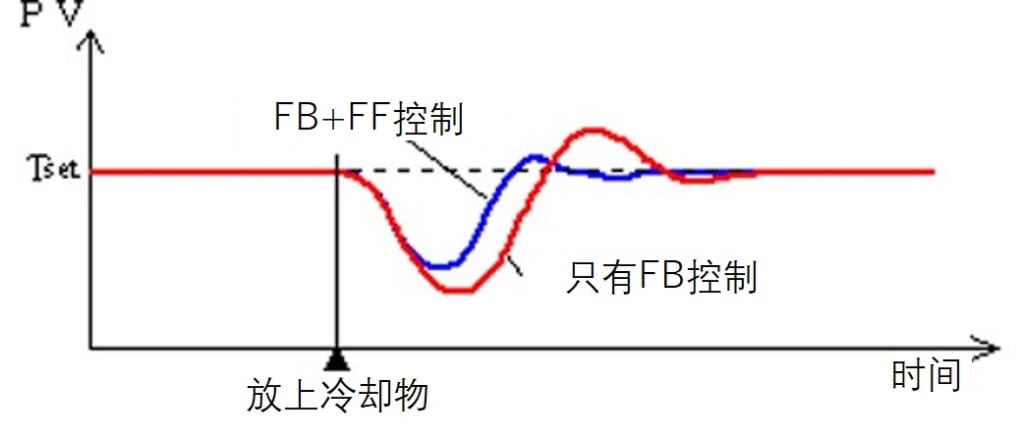
以前面“被加热物”控制的例子为例,当以Tset的良好反馈控制时,如果放置了“另一个冷却的物体”会怎样呢?(图5)
显然,放置后,测量点的温度变化是不会立即发生的。
然而,随着时间的推移,“放置的物体”的影响应该会导致温度下降。
由于在反馈控制中,只有检测到“这种温度下降”才能进行修正操作,所以最终会导致控制大幅混乱(图6)。
4. 前馈控制(FF控制)
为了弥补反馈控制的缺点,通常采用一种称为“前馈控制”的控制方法。
前馈控制是一种在可能扰乱控制的外部因素发生之前,即在其以“温度混乱”等形式显现之前,提前执行必
要的修正操作的控制方法。
基本概念图如图7所示。
如图7所示,“前馈控制”与“反馈控制”不同,其信号流程不形成封闭环路,而是一种单向控制方式,包括“扰动检测”→“操作量决定”。
因此,仅使用前馈控制不能使系统收敛到设定的温度,通常需要与反馈控制结合使用。
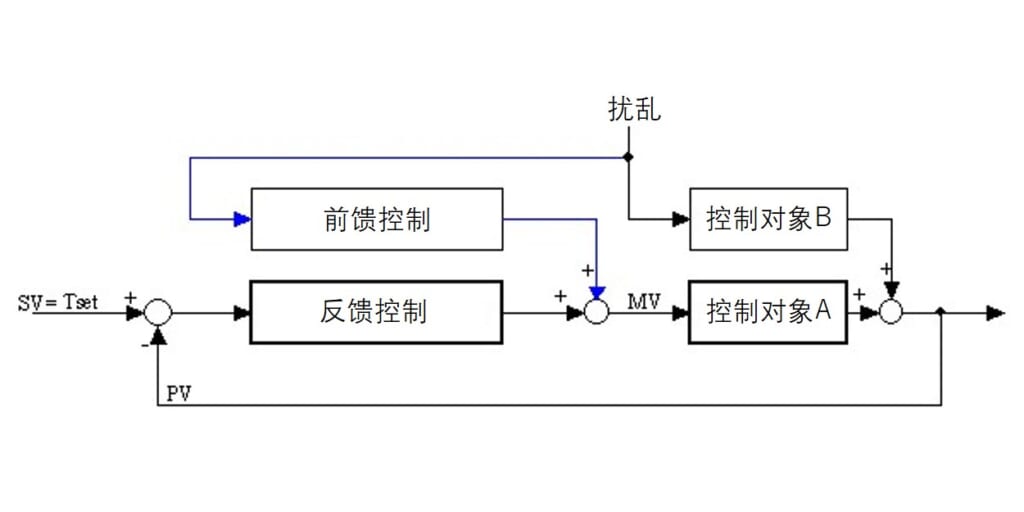
•控制对象A:从加热器到温度传感器的响应特性
•控制对象B:从扰乱要因到温度传感器的响应特性
5. 实施前馈控制的准备
前馈控制是一种在干扰等影响出现之前,提前采取修正操作的控制方式,因此需要以下两个要素:
(a) 预先检测干扰的手段
(b) 在检测到干扰时决定适当的修正量
(a) 中的“预先检测干扰的手段” 可以通过对序列性处理引起的干扰进行检测。
(b) 中的“检测到干扰时的适当修正量” 需要了解“是何种干扰”被输入,以及“由此产生了什么样的影响”,并在分析了这种影响是如何扰乱控制的机制后,确定适当的修正量。
6. 前馈控制的应用示例
电源电压波动的前馈
作为前馈控制的例子,我们将介绍“供应负载电力前馈对电源电压波动”的例子。
(a) 预测外扰:通过负载电压输入的变化来检测
(b) 外扰时的修正量:从电压变化中计算得到的负载电力变动量
这一功能已经搭载在“高分辨率温度调节计:REX-F9000”中。

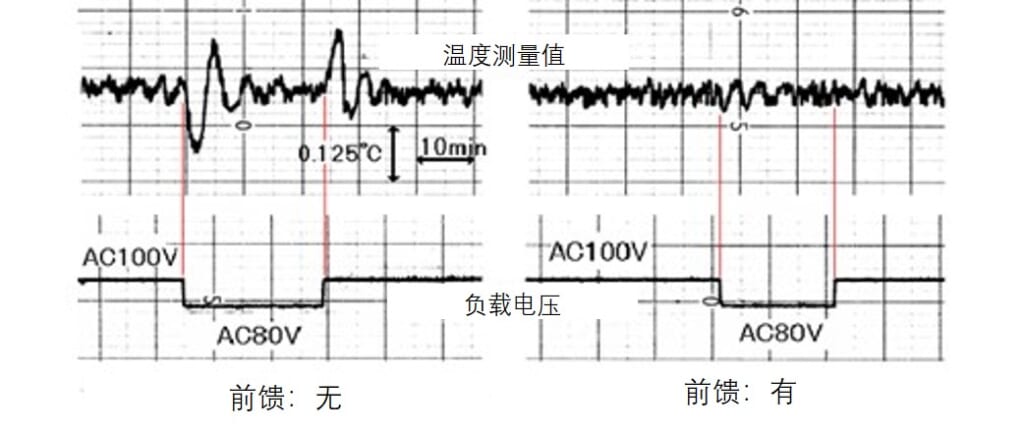
在这个例子中,前馈补偿的目的是通过监测负载电压的变化,将电压变化量的功率换算值加到PID控制运算值上,以提高控制性能,抑制由于负载电压的变化导致的“温度波动”。
接下来介绍如图9所示,使用本公司电源电压前馈测试装置的测试结果。
对于已知干扰的前馈
在前文第3项中,我们考虑了在对被加热物进行反馈控制的情况下,放置另一个“冷物体”的例子,这里
假设可以事先检测到干扰(放置冷物体)的发生。
在这种情况下,“被加热物”与“另一个物体”相结合,虽然由于控制对象的特性发生变化而引起的干扰需要进
行传热分析,但如果通过此分析,能够计算出适当的修正量,那么相对于仅使用反馈控制,可以获得更好
的控制结果。
7. 结语
反馈控制和前馈控制的优缺点您是否理解了呢?
我们公司的调节器大多数是用于反馈控制的调节器。
因此,通常针对可能破坏控制的外部因素,我们会通过调整PID参数来尽量减小反馈控制的不稳定性。
一般来说,通过将比例带设定得较窄,可以抑制外部干扰对控制系统的影响。
值得注意的是,如果将比例带设置得太窄,可能会导致”控制响应出现振荡”,因此需要谨慎。
此外,如果仅通过调整PID参数无法消除外部干扰的影响,建议尝试使用搭载前馈功能的SRX系列Z-1082规格。
SRX系列(Z-1082)具有自动调整前馈修正量的功能,因此是可以相对容易地实现前馈控制的仪表。