Technical Information
About heating and cooling control
1) Heating and cooling control
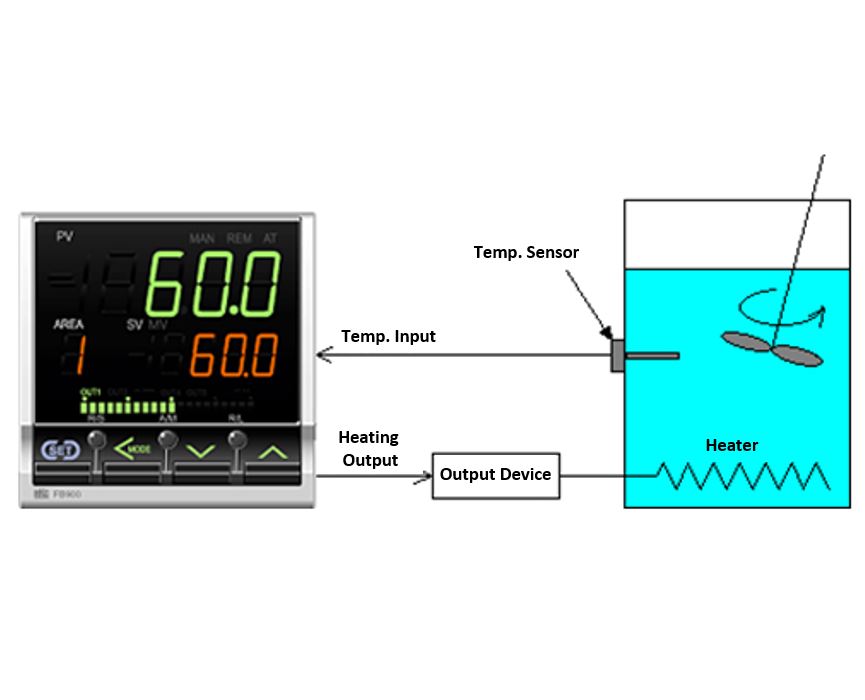
The commonly used heater heating control system performs PID control calculations to match the target temperature (SV) with the measured temperature (PV) of a control point and control the heater power supply.
Let us take the example of “Controlling the temperature of the liquid in the water tank” shown on the left.
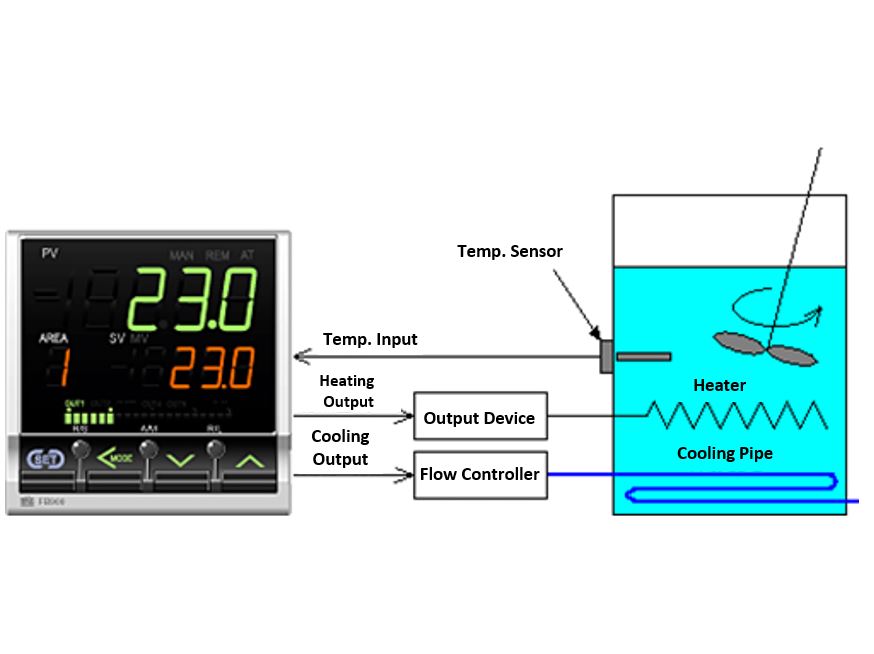
In this application, the cooling method is natural heat dissipation, therefore, the temperature must be set higher than the temperature of the atmosphere (outside air) where the storage tank is installed, otherwise the temperature control will not be possible. Therefore, in order to be able to control not only the “high temperature setting” but also the “low temperature setting” for the temperature of the atmosphere (outside air) where the water tank is installed, not only the heater but also the cooling liquid. It is necessary to provide a mechanism to control the heater and the cooling mechanism at the same time.
With a temperature controller that can select general heating / cooling control operation, the heating side operates in “reverse operation” and the cooling side operates in “forward operation”.
・ Reverse operation: A control operation, when the temperature measurement value increases, the output of the controller decreases.
(Temperature rise → heating output decreases)
-Positive operation: This is a control operation, when the measured temperature value increases, it will increase the output of the controller.
(Temperature rise → cooling capacity increases)
2) PID setting for heating and cooling control
Applications requiring heating and cooling control are two control systems: heating control system (heater ~ temperature sensor) and cooling control system (cooling mechanism ~ temperature sensor). In most cases, the response characteristics of the heating system and cooling system are different. .
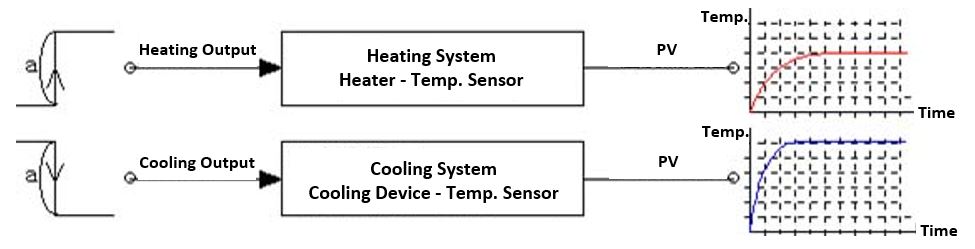
Therefore, the regulator is also made so that the PID constants can be set for the heating system and the cooling system, respectively.
・ Setting method of heating and cooling PID constant
There are two ways to set the PID constant in heating and cooling control, one of which is different according to the model, grade and manufacturer of the regulator.
(1) Types that can be set differently only when the proportional band is heated and cooled
Only for the proportional band setting, you can set the “heating proportional band”, “cooling proportional band”, “integral time setting” and “derivative time setting” of the heating system and cooling system in heating and cooling. Value. Therefore, as a heating and cooling PID regulator, four PID parameters “heating proportional band”, “cooling proportional band”, “integration time” and “derivative time” are used for control calculation.
In the PID constant setting method, the increase in setting items is only one, so the adjustment itself is not too difficult, but on the other hand, it is restricted from the point of careful adjustment.
(2) The type of independent PID constants can be set separately by the heating control system and the cooling control system
Since separate PID constants can be set for heating and cooling, a tighter combination of constants can be performed, but it is difficult to optimize PID constant settings.
3) PID action of heating and cooling
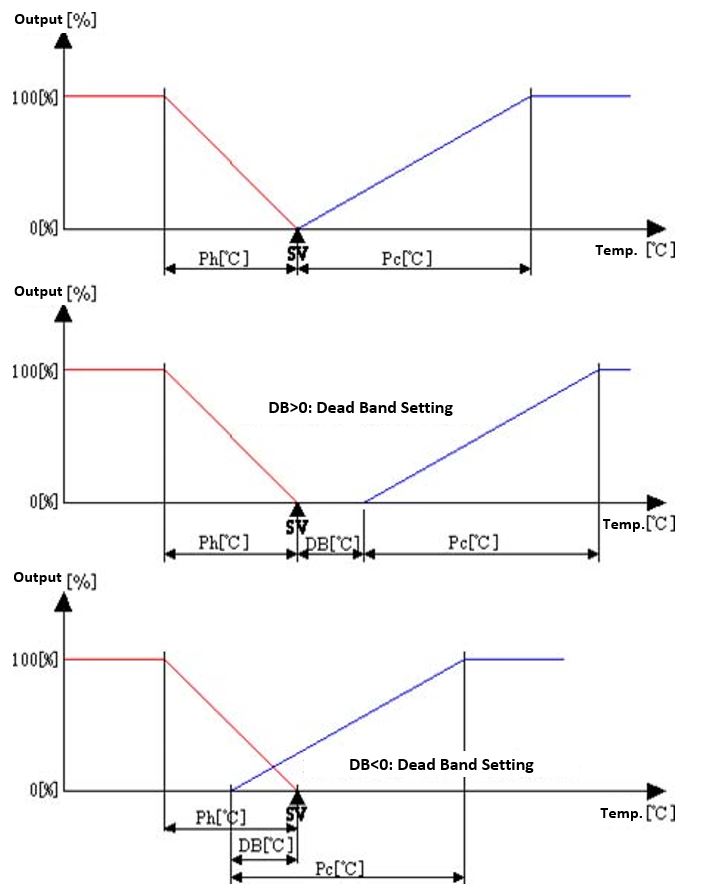
In order to simplify the heating and cooling control, please consider the heating side: proportional control, cooling side: proportional control.
The red line in the figure represents the heating output, and the blue line represents the cooling output.
As shown in the figure, the set temperature: relative to SV, the output value on the heating side is output in the region with a lower temperature measurement value, and the output value on the cooling side is output in the higher region.
In addition, the dead zone (dead zone) can be set by the switching point of the heating output and the cooling output, or vice versa.
Ph: Thermal proportional band setting [℃]
Pc: cooling proportional band setting [℃]
DB: Dead band setting [℃]
4) Cooling method and cooling characteristics
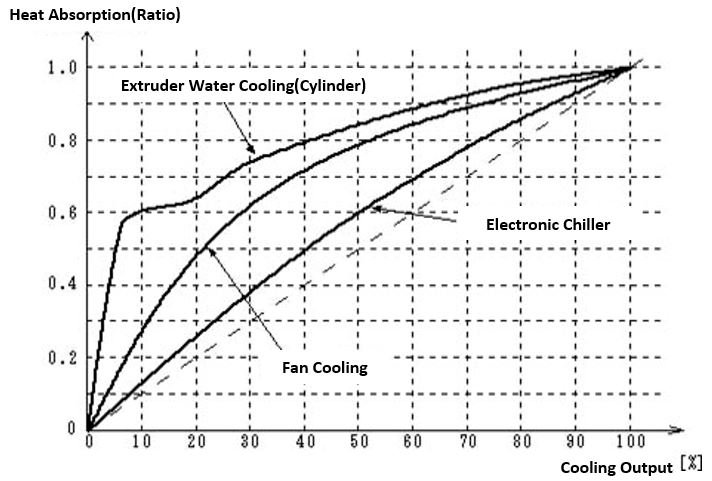
(1) Electronic cooling
Electronic cooling is a cooler that uses the Pelche effect. The Pelche element’s heat-absorbing surface is placed close to the heated (cooling) object to absorb heat, so the controller’s cooling output value can be basically regarded as a linear Endothermic.
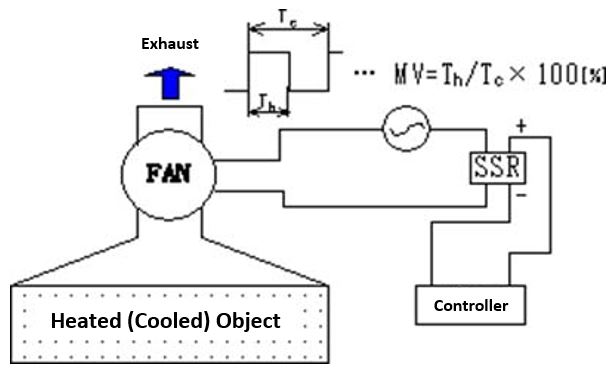
(2) Air cooling using fans
The air cooling method used for air-cooled plastic molding machines is to cool the heated (cooled) objects by blowing with an electric fan. Using normal relays and SSR and other operators, it is turned on according to a predetermined output cycle time. Disconnect the ratio to control the amount of cooling. Start. Therefore, the “output value” of the controller is proportional to the “power ratio of the fan motor”, but due to the influence of the inertia of the fan and the heat transfer, the cooling output value and the obtained heat absorption cannot be regarded as linear Non-linear relationship.
(3) Water cooling
The cooling method used in a water-cooled plastic molding machine, etc., is a method of cooling the water flow to the cooling pipe equipped with the object to be heated (cooled) at 100 ° C or higher through a solenoid valve. Due to the influence of the phase change and heat transfer of the water as the cooling medium, the output value of the controller and the heat absorption amount are not in a linear relationship, as in the air-cooling type described above. In addition, the nonlinear characteristics are stronger than air cooling.
5) Non-linear cooling characteristics and PID tuning
In the previous paragraph, it was introduced that in applications using heating and cooling control, the static characteristics of the cooling side sometimes become non-linear.
Then, the decision of the PID constant also needs to consider the static characteristics of the heating system and the cooling system. If the characteristic is considered to be linear (linear), then a set of PID constant settings can cover all load conditions, but cannot be considered linear It can be adjusted according to operating conditions.
So, for such a control object, how to determine the PID constant?
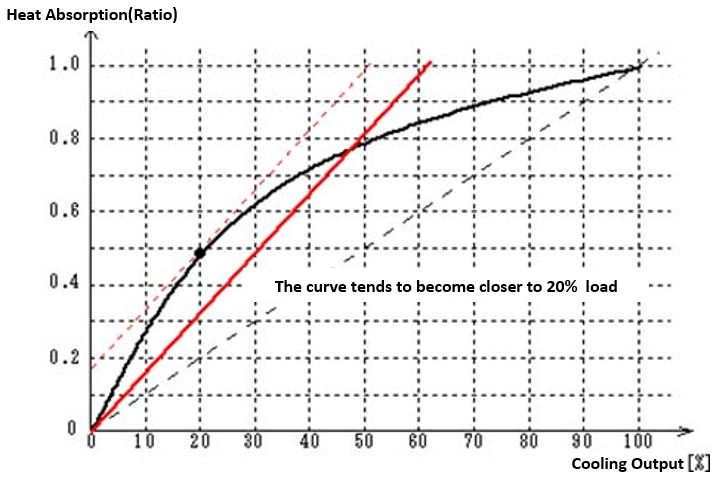
(1) No major change in the control point
Temperature setting value: When the SV is always the same and there is no big interference, the PID constant can be determined by linear approximation of the response characteristics near the operating conditions.
For example, as shown in the figure to the right, in the control object with cooling characteristics, when the load factor during stable operation is close to 20% cooling, the PID constant can be determined by linearly approximating the cooling characteristics around 20% cooling, which can control The amount controlled around this load factor.
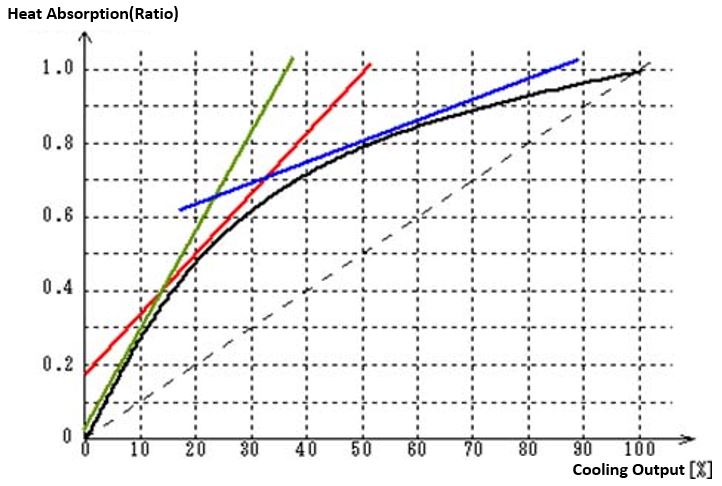
(2) The situation where the control point changes greatly
Set temperature: When the change range of SV and external interference are large, the load conditions during the operation of the device are also very different, so only one operating condition cannot be linearly approximated. Therefore, the PID constant needs to consider setting temperature conditions and load fluctuation conditions, etc., and perform switching control according to each condition.
In the example below,
“Cooling load rate: Conditions under less than 20% control” (green line)
“Cooling load rate: Conditions controlled at around 20%” (red line)
“Cooling load rate: control conditions exceeding 20%” (green line)
To determine the PID constant by linear approximation under equal load conditions, it is necessary to switch the constant setting according to the operating conditions.
6) Conclusion
The control of the cooling side may become non-linear depending on the cooling method, and the design becomes more difficult than the normal heating control. However, it can be said that “one heating and cooling can be controlled by one controller” This is a very effective control method.
In order to maximize the advantages of this heating and cooling control, the heating and cooling PID control installed on our temperature controller is used for the “fan cooling” and “water cooling of heating objects used at conditions exceeding 100 ° C” introduced You can also get good control results and work hard on the control algorithm.
In addition, regarding the determination of the PID constant, the performance of the heating and cooling control algorithm can also be fully utilized,
“Cooling control system with basic linear cooling characteristics”
“The cooling control system has a linear cooling characteristic that cannot be seen in air-cooled extruders”
“The cooling control system is very nonlinear and can be seen in water-cooled extruders.”
The various conditions of the are prepared, which can correspond to a wide range of applications.