技術解説
加熱冷却制御について
1)加熱冷却制御とは
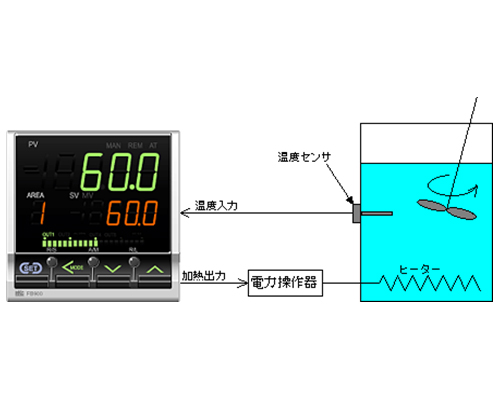
通常用いられているようなヒータ加熱制御系は、一つの制御点に対して目標温度(SV)と測定温度(PV)が一致するようにPID制御演算を行い、ヒータ供給電力を制御しています。
左図に示す「タンク内の液体温度の制御」を例に考えてみましょう。
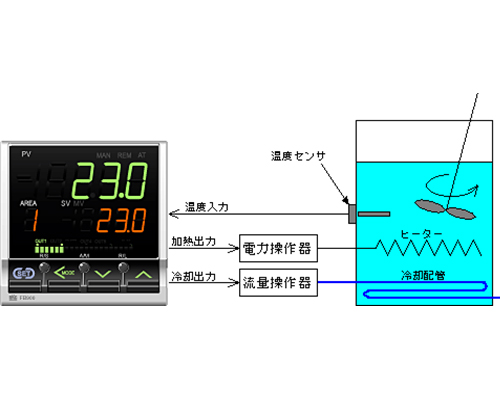
このアプリケーションでは、制御対象である液体の冷却手段が自然放熱以外ないので、タンクが設置されている雰囲気(外気)温度より高い温度設定にしなければ温度制御が成り立ちません。 従って、タンクが設置されている雰囲気(外気)温度に対して「高い温度設定」だけでなく「低い温度設定」に対しても制御が出来るようにするには、ヒータだけでなく液体を冷却する機構を設けて、ヒータと冷却機構を同時に制御する必要があります。
一般的な加熱冷却制御動作が選択できる温度調節計では、加熱側は「逆動作」、冷却側は「正動作」で動作します。
・逆動作:温度測定値が増加した場合に調節計の出力が減少する制御動作を言います。
(温度が上昇→加熱出力が減少)
・正動作:温度測定値が増加した場合に調節計の出力も増加する制御動作を言います。
( 温度が上昇→冷却出力が増加)
2)加熱冷却制御のPID設定
加熱冷却制御が必要なアプリケーションは、加熱制御系(ヒータ~温度センサ)と冷却制御系(冷却機構~温度センサ)という2つの制御系を持ち、ほとんどの場合は、加熱系と冷却系の応答特性は異なります。
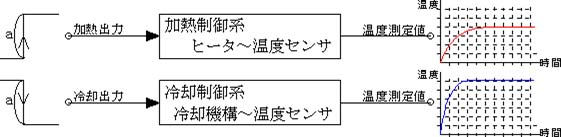
このため、調節計も加熱系と冷却系のそれぞれに対してPID定数が設定出来るように作られています。
・加熱冷却PID定数の設定方式
加熱冷却制御におけるPID定数の設定方式は2種類あり、どちらの方式かは調節計の機種やグレード、また調節計メーカにより異なっています。
(1)比例帯のみ加熱と冷却で異なる設定が可能なタイプ
比例帯設定のみ加熱系および冷却系に対して「加熱比例帯」「冷却比例帯」と個別に設定が可能で、「積分時間設定」と「微分時間設定」は加熱と冷却で共通の設定値を用います。従って、加熱冷却PID調節計としては、「加熱比例帯」「冷却比例帯」「積分時間」「微分時間」の4つのPIDパラメータで制御演算が行われます。
このPID定数設定方式の場合、設定項目の増加が1つのみであるため調整自体はそれほど困難にはなりませんが、反面、緻密な調整という観点では制約されることになります。
(2)加熱制御系と冷却制御系でそれぞれ独立したPID定数設定が可能なタイプ
加熱と冷却各々に対して独立したPID定数が設定できるため、より緻密な定数あわせ込みが可能になりますが、その分PID定数設定の最適化が難しくなります。
3)加熱冷却PID動作
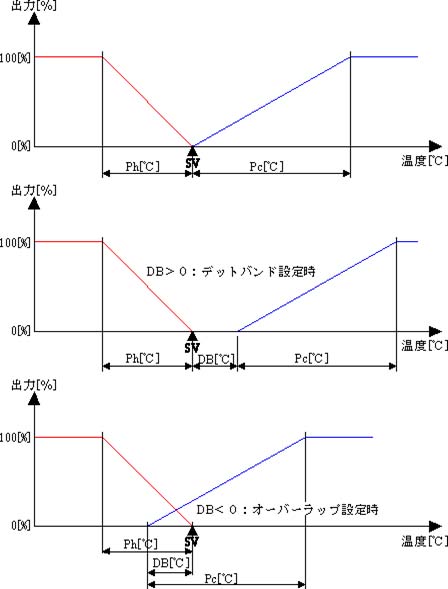
加熱冷却制御動作について、簡単化のため加熱側:比例制御、冷却側:比例制御の場合を考えてみましょう。
図の赤いラインは加熱出力、青のラインは冷却出力を示しています。
この図からわかるように、設定温度:SVに対して、温度測定値が低い領域では加熱側、高い領域では冷却側の出力値が出力されます。
また、加熱出力と冷却出力の切り替わりポイントで不感帯(デットバンド)を設けたり、逆にオーバーラップさせて出力することが可能です。
Ph: 熱比例帯設定[℃]
Pc: 冷却比例帯設定[℃]
DB: デットバンド設定[℃]
4)冷却方式と冷却特性
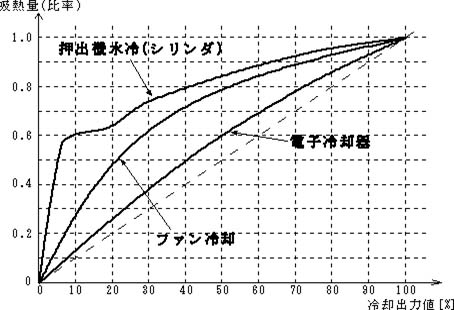
(1)電子冷却
電子冷却は、ペルチェ効果を利用した冷却器で、ペルチェ素子の吸熱面を被加熱(冷却)物に密着させて吸熱するため、コントローラの冷却出力値に対してほぼ直線と見なせる吸熱ができます。
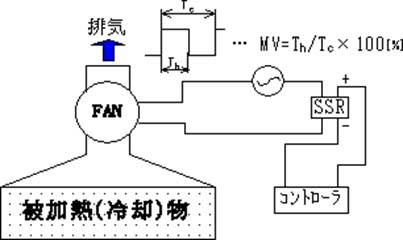
(2)ファンを用いた空気冷却
空冷式のプラスチック成形機などで用いられている空気冷却方式は、電動ファンで風を送って被加熱(冷却)物の冷却を行っており、通常リレーやSSRなどの操作器を用いて、あらかじめ設定した出力周期時間に対するオンオフ比率により冷却量を制御しています。このため、コントローラの「出力値」と「ファンモータの通電比率」は比例した関係になるのですが、ファンの慣性や熱伝達の影響で、冷却出力値と得られる吸熱量は直線的と見なすことができない非線形な関係となります。
(3)水による冷却
水冷式のプラスチック成形機などで用いられている冷却方式は、100℃以上の被加熱(冷却)物に設備された冷却配管に電磁弁を介して水を流し冷却する方式です。冷媒となる水の相変化や熱伝達の影響により、前記の空冷式と同様にコントローラの出力値と吸熱量は直線的な関係になりません。また、空気冷却よりもさらに強い非線形特性となります。
5)非線形な冷却特性とPIDのチューニング
前項では、加熱冷却制御が用いられるアプリケーションの中には、冷却側の静特性が非線形となってしまう場合があること紹介しました。
さて、PID定数の決定には加熱系および冷却系の静特性も考慮する必要があり、この特性が線形(直線的)と見なせる場合には、1組のPID定数設定ですべての負荷条件がカバーできますが、線形と見なすことができない場合は運転条件に合わせた調整が必要となります。
では、このような制御対象に対して、どのようにPID定数を決めればよいのでしょうか?
(1)制御点に大きな変動が生じない場合
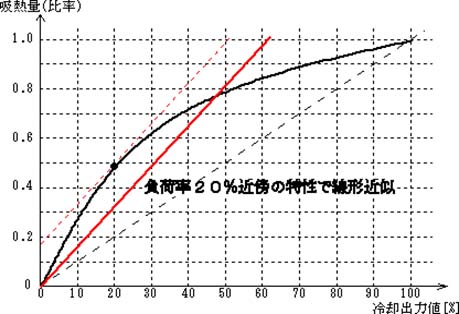
温度設定値:SVがいつも一定で変わりなくまた、大きな外乱もない場合は、運転条件近傍の応答特性で線形近似してPID定数を決めることができます。
たとえば、右図のような冷却特性を持つ制御対象で、定常運転時の負荷率が冷却20%近傍である場合、冷却20%近傍の冷却特性を直線近似してPID定数を決定することで、この負荷率付近で制御する分には良好に制御ができます。
(2)制御点が大きく変わるような場合
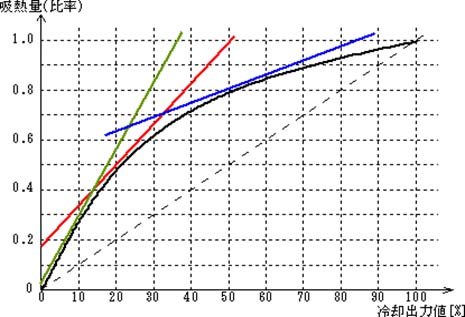
設定温度:SVの変更幅や外乱が大きい場合は、装置運転時の負荷条件も大きく異なるため、一つの運転条件だけで線形近似する事ができません。このため、PID定数は設定温度条件や負荷変動条件などの考慮して、それぞれの条件ごとに切り替えて制御させることが必要です。
下図の例では、
「冷却負荷率:20%未満で制御する条件」(緑線)
「冷却負荷率:20%前後で制御する条件」(赤線)
「冷却負荷率:20%を越えて制御する条件」(青線)
などの負荷条件で線形近似してPID定数を決定しておき、運転条件に応じて定数設定を切り替えることが必要です。
6)まとめ
冷却側制御は、冷却方式によっては非線形な特性となる場合もあり、通常の加熱制御と比べて設計が難しくなりますが、”1台の調節計で加熱と冷却の両方の制御ができる”という点で非常に有効な制御方式であるといえます。
弊社ではこの加熱冷却制御のメリットを最大限に生かせるように、弊社温調計に搭載されている加熱冷却PID制御には今回紹介した「ファンによる空冷」や「100℃を越える条件で使用される被加熱物に対する水冷」に対しても良好な制御結果が得られるように制御アルゴリズムの工夫を施しています。
また、PID定数の決定についても加熱冷却制御アルゴリズムの性能を十分に生かすことのできるオートチューニング機能を、
「ほぼ線形な冷却特性を持つ冷却制御系」
「空冷式の押出機に見られるような線形とは見なすことのできない冷却特性を持つ冷却制御系」
「水冷式の押出機に見られる非常に強い非線形性をもつ冷却制御系」
のそれぞれの条件ごとに用意しており、幅広いアプリケーションへの対応ができるようになっています。