技術解説
PID制御とは
各種プロセス制御で使われているPID制御について理解して頂くために、やさしく解説しているページです。初心者にもわかりやすく説明しました。
![]()
温度制御をはじめとした各種制御に用いられる一般的な制御方式としてPID制御があります。
今回は、このPID制御の各要素、P(比例制御),I(積分制御),D(微分制御)について、それぞれどのような働きをするものなのかを、比較的なじみの深い「車の運転」を例に説明したいと思います。
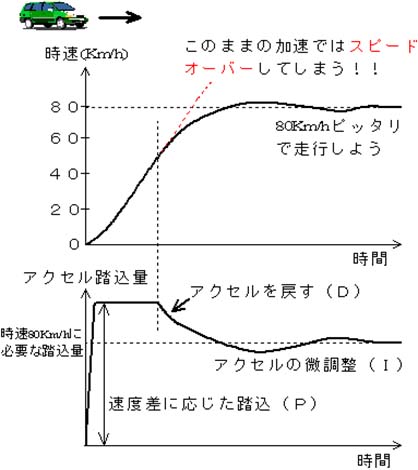
高速道路の料金所で一旦停止したところから、時速 80Km で巡航運転するまでの操作を考えてみてください。
まず、速度 0Km/h から目標とする時速 80Km までの差(制御では偏差と表現する)が大きいため、アクセルを大きく踏み込みます。(大きな出力を加える)
このように、目標との差(偏差)の大きさに比例した操作を行うことが比例制御(P)に相当します。
車が加速して時速 80Km に近づいてくると、「このままの加速では時速 80Km をオーバーしてしまう」と感じてアクセルを緩める操作を行います。
このように、速度の変化に対して、それを抑える様な操作を行うことが微分制御(D)に相当します。
最後に、時速 80Km ピッタリで走行するため、微妙な速度差をなくすようにアクセルを調整します。
このように、目標とする速度との差(偏差)をなくすような操作を行うことが積分制御(I)に相当します。
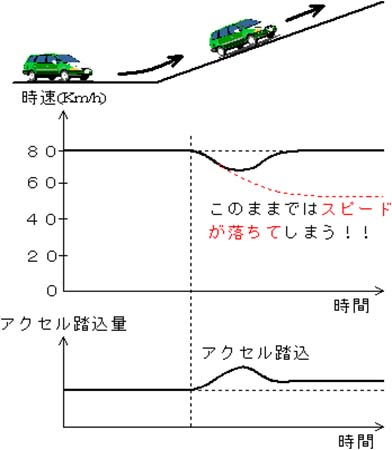
次に、時速 80Km で走行しているときに、急な上り坂にさしかかった場合を考えてみてください。
上り坂にさしかかると、今までと同じアクセルの踏み込み量のままでは徐々にスピードが落ちてきます。
運転手は、スピードの変化を感じ取り、スピードを落とさないようにアクセルを踏み込みます。
このときの操作も速度の変化を抑える動きになり微分制御(D)に相当します。
当然、目標としている速度との差(偏差)が生じているので、この差をなくすように操作しているとも考えられますので、積分制御(I)も同時に行っているのですが、より早く元のスピードに戻そうとするために微分制御(D)が大きく貢献しているのです。

最後に、比例制御のもう一つの役割である制御全体の能力(制御ゲイン)を決定することについてご説明します。
我々は、最高時速150Kmの乗用車に乗っても、時速300Km出せるスポーツカーに乗っても例に示したような運転を行うことが出来ます。
これは、どの程度アクセルを動かせばどの程度速度が変化するかを無意識のうちに判断し、適切な操作を行うことが出来るからです。
乗用車とスポーツカーでアクセルを動かせる量が同じだとすると、同じだけアクセルを踏み込んだときに到達する車のスピードは乗用車に比べ、スポーツカーの方が速くなります。(この例では乗用車に比べスポーツカーの方が2倍の速度になります)
車を制御する対象だと考えると、スピードを出す能力(制御ではプロセスゲインと表現する)は乗用車よりスポーツカーの方が高いといえます。
プロセスゲインの高いスポーツカーで速度を変化させようとしたとき、乗用車の時と同じだけの速度を変更するためにはアクセルの変更量(出力量)は乗用車より少なくしなければなりません。
制御対象の応答(車の例ではスピード)を一定量変化させるために必要な制御出力(車の例ではアクセルの踏み込み量)の割合を制御ゲインと表現します。
スポーツカーで乗用車と同じだけスピードを変化させるとき、アクセルの変更量は乗用車より少なくしなければならないということですから、スポーツカーを運転するときの制御ゲインは乗用車より低くなっているといえます。
PID制御では、制御ゲインの決定は比例帯の設定により行います。
比例帯を狭くすると制御ゲインは高くなり、広くすると制御ゲインは低くなります。
このように、比例制御には、制御対象にあった制御全体のゲインを決定するという役目もあるのです。
車の運転について2つの例を説明しましたが、1つ目の一定速度で走行するまでの動きは「目標値変更に対する制御」に相当し、2つ目の坂道での走行は「外乱に対する制御」に相当します。
一般に行われている制御の大部分がこの2つの制御であり、そこでPID制御が用いられているのです。
我々はPID制御を知らなくても、車の運転は出来ます。
しかし、運転の際行っている操作にはPID制御と同じメカニズムがあり、我々は無意識のうちにPID制御を行っていると言っても良いのかも知れません。
PID制御は、以外と身近なものなのです。