技術解説
制御性向上のために(ARW式PID制御編)
ARW式PID制御での制御性向上について説明します。
①ARW式PID制御のオートチューニングについて
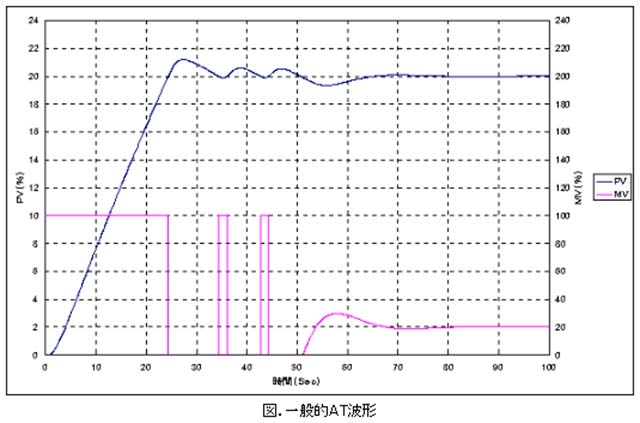
オートチューニング(AT)とは、制御したいもの(制御対象)に合ったPID定数を自動的に求める機能で、ARW式PID搭載機種にも用意されています。
動作としては、出力0-100%によるOn/Off制御での温度測定値(PV)の動きからPID定数を求めます。
ARW式PID搭載機種でのATは、エンハンストAT(ブリリアントPID制御用AT)に比べ緩やかなPID定数(比例帯が広く、積分時間・微分時間が長め)が求まるようになっています。
※1 エンハンストATについては「1.制御性向上のために(ブリリアントPID制御編)」を参照してください。
②SV変更時の応答とPID定数の関係について
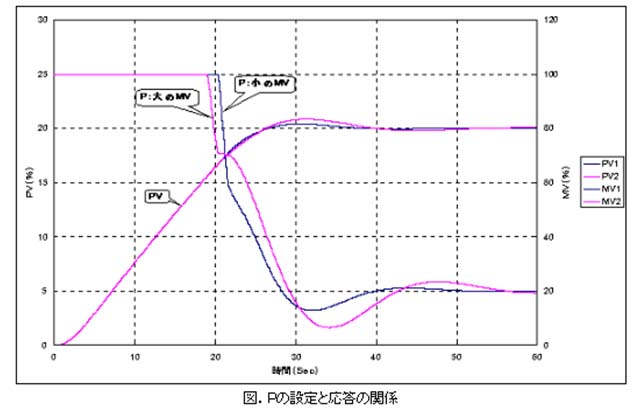
SV変更によって出力が100%(又は0%)に飽和するような場合、PID定数とPVの応答速度やオーバーシュート量(又はアンダーシュート量)には次のような傾向が見られます。
P : 小 → オーバーシュート : 小 , 応答速度 : やや遅い
P : 大 → オーバーシュート : 大 , 応答速度 : やや速い
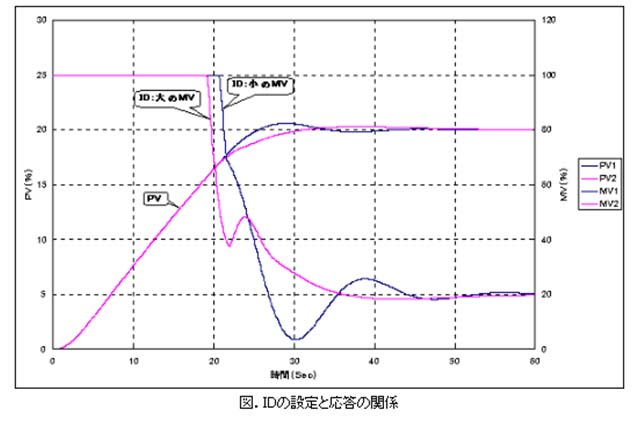
ID: 小 → オーバーシュート : 大 , 応答速度 : 速い
ID: 大 → オーバーシュート : 小 , 応答速度 : 遅い
③SV変更時のオーバーシュート(アンダーシュート)を小さくする方法
SV変更により出力が飽和するような、大きなSV変更を行う場合に、オーバーシュート(アンダーシュート)を小さくするには、上記PID定数と応答の関係から考えると、比例帯(P)を小さくし、積分時間(I)及び微分時間(D)を大きくすることが有効です。
しかし、この方法では応答自体が遅くなってしまうのであまり得策とは言えません。
また、ARW式PID搭載機種でのATは、エンハンストAT(ブリリアントPID制御用AT)に比べ緩やかなPID定数(比例帯が広く、積分時間・微分時間が長め)が求まる傾向にあり、元々IDは大きめに算出されているので、AT結果からIDを大きくしていくと振動気味になる可能性があるので注意が必要です。
(AT結果から手動チューニングを開始する場合は、比例帯(P)を小さくするだけでも効果があります。)
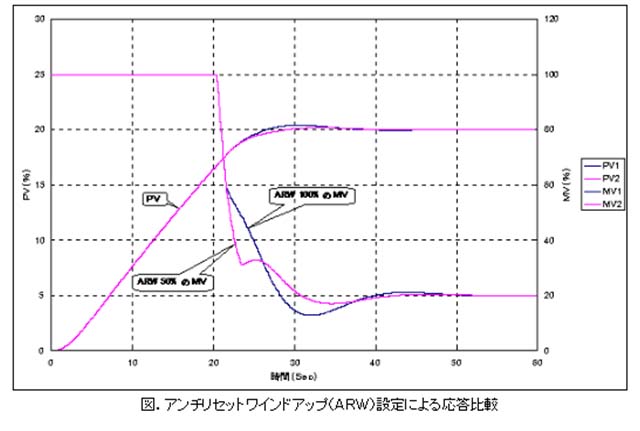
一方、ARW式PID制御搭載機種では、オーバーシュート(アンダーシュート)を防止する機能として、積分を働かせる範囲を指定する設定項目(アンチリセットワインドアップ:加熱側比例帯に対する%設定)があり、この値を小さくすることでもオーバーシュート(アンダーシュート)を抑制することが可能です。(この方法も、基本的には応答が遅くなる傾向にあります。)
★ 一口メモ ARW式PID搭載機種のAT結果が、エンハンストATに比べてどの程度緩やか
なPID定数として求まるかを以下に示します。
(注:負荷率条件などにより定数が変化するため、大まかな範囲で示しています。)
比例帯 (P) → 1.5 ~ 2.5 倍
積分時間(I)及び 微分時間(D) → 1.2 ~ 1.7 倍
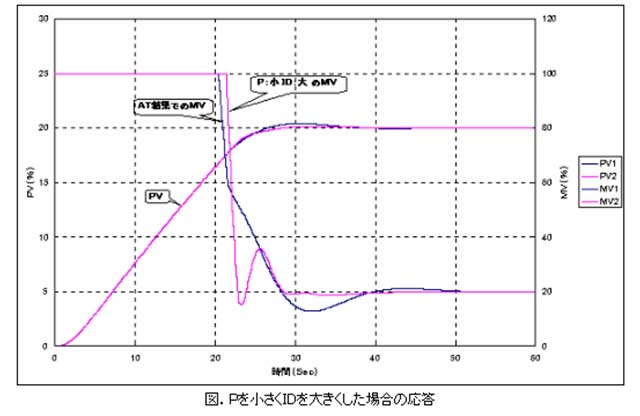
SV変更により出力が飽和するような、大きなSV変更を行う場合に、なるべく応答速度を落とさず、オーバーシュート(アンダーシュート)を小さくするには、比例帯(P)を小さくし、積分時間(I)及び微分時間(D)も小さくすることで実現できます。
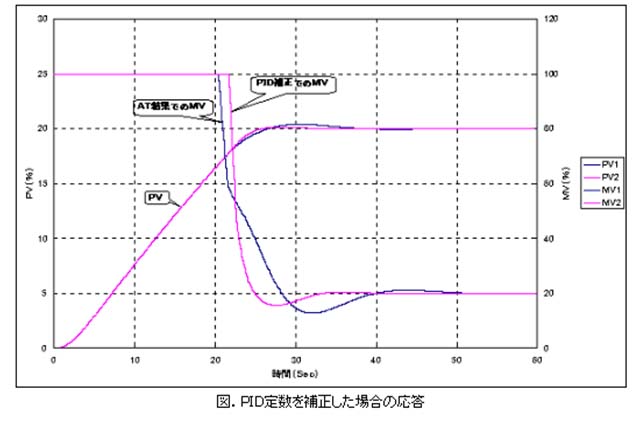
ARW式PID搭載機種のAT結果から手動チューニングを行う場合の目安としては、エンハンストAT(ブリリアントPID制御用AT)結果より少し緩やかなPID定数(比例帯が広く、積分時間・微分時間が長め)になるようにチューニングすると良いでしょう。(ARW式PID搭載機種のAT結果とエンハンストAT結果の違いについては「一口メモ」を参照して下さい。)
左図は、ARW式PID搭載機種でのAT結果から「P/2.0,I/1.5,D/1.5」とPID定数を補正してARW式PID制御を行った場合のシミュレーション結果です。