技術解説
温度制御の手引き
1.温度制御の概要
1)温度制御とは?
対象となっているものの温度を必要な温度になるように操作することを温度制御といいます。
2)温度制御の良さ
制御対象を制御していくうえでの温度変化を、制御結果といいます。温度制御の良さとは、いかに制御結果を理想的な応答に近付けるかということになります。
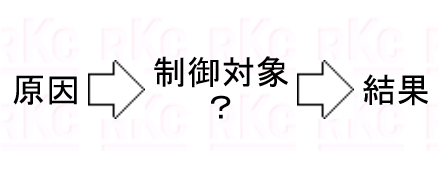
3)制御対象の特性(応答)
制御結果を良くするためには、外乱やその制御対象の温度特性等をよく知ったうえで、その対象にあった温度制御を行うことが必要です。
4)温度制御の種類
制御の種類には、大別すると次の2つがあります。
・シーケンス制御
・フィードバック制御
5)温度制御の構成
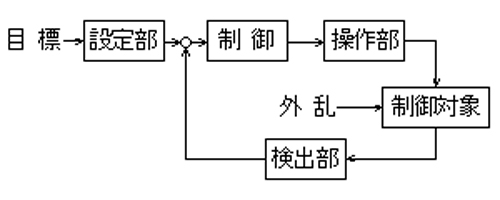
一般的な温度制御の構成を図に表すと下図のようになります。これはフィ-ドバック制御の構成になっています。
6)制御動作
制御動作は、温度制御系の制御部の内容をいいます。制御対象の温度特性を良く知ったうえで適切な制御動作を選びましょう。主な温度制御動作には、次のようなものがあります。
・オンオフ動作
・比例(Proportional)動作
・PID動作
・微分先行型PID動作
・比例先行型PID動作
など
7)PID定数のチューニング法
PIDの制御結果を最適にするには、P(比例帯)・I(積分時間)・D(微分時間)の各定数を最適値にする必要があります。弊社の温度調節計は、これらの各定数を自動的に演算する機能が備わっています。手動で各定数を求める方法(チューニング)としては、ステップ応答法や限界感度法などがあります。
8)応用による制御方法
各制御動作(P・PID)を応用して次のような制御動作が行えます。
・カスケード制御
・加熱冷却制御
2.身近な温度制御
私たちは、“温度を測る”という作業は日常生活の中でいろいろと体験しています。“体がだるい”とか“熱っぽい”と感じたときは体温を測るでしょう。また、部屋の温度が何度であるか知りたいときは、寒暖計などで温度を知ります。それでは“温度制御”はどうでしょうか? “温度制御”となると一転して、「工業分野のものだから日常生活には関係ない」と思われがちですが、実際にはわたしたちの身のまわりでも“温度制御”は行なわれています。
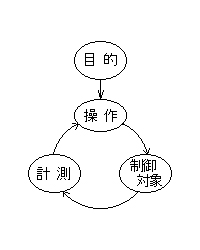
そもそも“制御”(control)とはどういったことなのでしょうか?これは、工学書の定義によれば「ある目的に適合するように、対象となっているものに所要の操作を加えること」という抽象的な表現になります。これをもっと具体的に身近なものに置き換えてみましょう。
ある寒い冬の日、外出先から自宅へ帰ってきたとします。部屋の中も冷えきっているのでストーブに火をつけました。はじめ寒かった部屋はだんだん暖かくなって、セータも要らなくなってきます。あまり暖かくなりすぎたのでストーブの火を弱くしてしばらくすると、今度は寒くなってきます。ストーブの火を強くしたり弱くしたりしながら適当な強さにしておくと、部屋の中は、ほぼ心地よい温度に落ちついてきます。このように、“温度制御”が行われている場合、そこには何らかの「目的(部屋の温度を心地よくする)」があって「対象(部屋の温度)」と「操作(ストーブの火を強くする・弱くする)」と「計測(暑い・寒い)」といった概念がむすびついて意味をもってきます。
3.手動制御と自動制御
部屋の温度を“20℃”にしたいとか、自動車の速度を時速50㎞にしたいとかの“目的”を達成させるには、“操作”をするための装置が必要になります。つまり、わたしたちの手や足がこれにあたるわけです。そのようにして“対象”に、ガスの元栓を開閉したり、アクセルを踏んだりして変化をあたえます。その結果、目的に適しているかを“計測”することが必要となります。
このような働きを“制御装置”によって自動的に行う作業をとくに自動制御(automatic control)といいます。たとえば電気コタツやエアコンの動作は自動制御といえます。
これに対して、前に述べた室内の温度調節や自動車の速度調節は、自動ではなく人間が制御動作を行うので手動制御(manual control)といいます。
4.温度制御系での用語
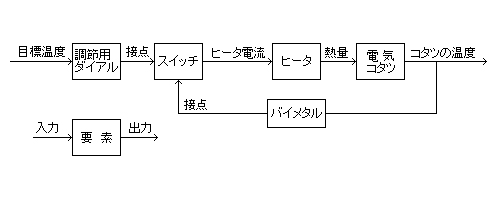
図を見てください。これは、電気コタツの温度制御の関連を図示したものです。 このように表されたものには、いろいろな用語を使って表現します。
電気コタツなどの電気製品は、いくつかの部品から構成されています。この分割された1つ1つの部品を要素(element)といいます。どこまでを1つの要素とするかは決まっていませんが、通常、各信号の性質が変化するところのブロックを1つの要素としています。
これらの要素が集まって相互に関係をもち、ある所定の目的を果している集団をシステム(system)とよんでいます。私たち人間のまわりにある自動車、時計などありとあらゆるものが、システムといえます。その中でとくに制御を目的としたシステムを制御系(control system)といいます。そのようなシステムにおける要素間の相互作用において“原因”となる例と“結果”となる例を区別します。そして要素に加えられる何らかの物理量、たとえば電気コタツではヒータに流れる電流などを入力(input)または入力信号(input signal)といい、入力信号が要素で変化を受けて出ていく物理量、電気コタツではコタツの温度などを出力(out put)または出力信号(output signal)といいます。それらの信号の連絡を矢印を付けて因果関係を示すのに線図を用いると、制御系全体の構成や特性を知るのに大変便利になります。 このような線図をブロック線図(block diagram)とよんでいます。
5.温度制御の良さとは
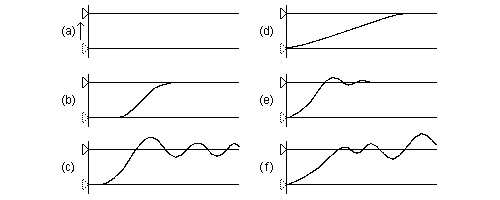
温度制御の理想としては、目標温度の変化(設定温度の変更・電源投入時の立ち上り)に対して制御温度が忠実に追従してくることです。図(a)のような目標温度のステップ状変化に対しての理想的な応答は、図(b)の制御となります。しかし、現実的には、制御対象や検出部・操作部などに時間遅れがあるので、調節部は、遅れて戻ってきたフィードバック信号(制御温度)に対して訂正動作が行われます。そのために制御結果は、図(c)のように“オーバシュート”をおこしたり、“サイクリング”を生じたりします。それをおそれて制御動作のゲイン(Kp)を小さくしすぎると、今度は図(d)のように目標温度への近づきかた(速応性)が悪くなります。 また、図(f)のように、サイクリングが減衰せずに、しだいに大きくなっていくこともあります。 図2の現実的な制御結果(c)、(d),(e)のうち、どれを良い応答とするかは制御の目的によって異なりますが、一般には、図(e)のように、“定常偏差”(オフセットともいいます)がなく、即応性がまあまああり、あまり振動的でないものが良いとされています。 良い制御結果を得るためには、“制御対象”や“検出器” 、“操作部”など制御系を構成する“要素”の動特性をよく知って、適切な制御動作を選ぶ必要があります。
良い制御とは、次のようなことを考慮したものです。
1)オーバシュート,ハンティングがないこと
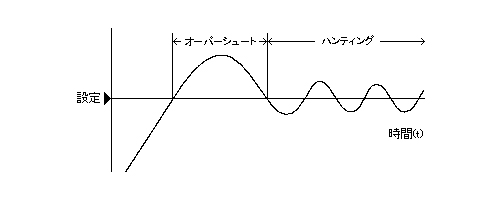
実際の温度が設定値(目標温度)を通りこして、上ってしまう現象を“オーバシュート”といいます。
設定値に対して実際の温度が一致せず上下に変動する現象を“ハンティング”といいます。
2)速応性・安定性が良いこと
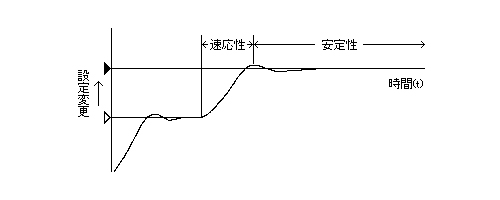
設定値が変化すれば、その変化に応じて温度がただちに設定値に追従することを“速応性”といいます。外乱を含めて実際の温度に何らかの変化があれば、それにともなう過渡状態(ハンティング)をすみやかになくし、定常状態におちつかせることを“安定性”といいます。
3)定常偏差がないこと
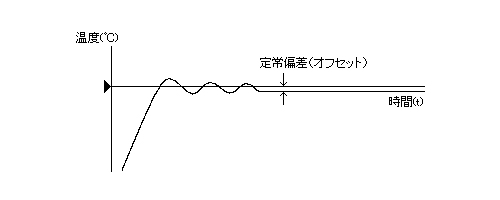
定常状態における実際の温度と設定値とのずれを“定常偏差”または“オフセット”といいます。
4)過渡状態、定常状態
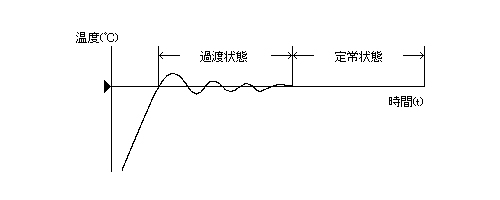
外乱の影響や設定値の変更などで、実際の温度が乱れる、このはじまりの過渡時の状態を“過渡状態”といいます。 過渡時が過ぎさるとある一定値におちつきますが、この状態を“定常状態”といいます。
これらのことは、一般的に相反することが多く、全てをなくすことは現実的に不可能です。
実際には、それぞれの内容がその制御系に対して許容できる範囲で制御するのが普通です。
6.温度制御対象の特性
私たちは初対面の人と話しをする場合、相手の性格も前もって知っていればスムーズに話しをすすめることができます。温度制御でも同じことがいえて、最適な制御を行うためには、制御対象の性質をよく知っておく必要があります。それでは制御対象の性質はどのようにして知ればよいでしょうか。 私たちが箱の中身を知ろうとするとき、箱をたたいてみたり、振ったりして内部の反応をさぐります。温度制御でも、制御対象の性質として“動特性”を問題にします。動特性を調べるには、それを少し動かしてみて、どのような動きをするかを確めて判定します。その方法に“ステップ応答法”と“周波数応答法”がよく用いられます。
7.動特性と静特性
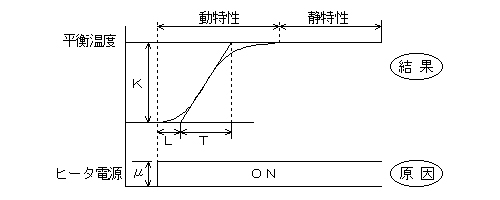
| 静特性 | 動特性 |
| K/μ :ゲイン定数 | L=ムダ時間 T=時定数 |
制御対象が入力を受けると影響を受けて、その結果が出力となってあらわれる動的パターンは、制御対象の特性によっていろいろあります。たとえば、お風呂の温度はガスバーナに点火すると徐々に上がって、やがて一定温度になりますが、お寺のつり鐘を叩けば“ゴーン”としばらく振動して、静かになっていきます。
このように、ある現象の時間的変化によって制御対象の特性を示したものを動特性(dynamic characteristic)といいます。
これに対して、バネの荷重と伸びの関係のように、一定値におちついた状態における入力と出力の関係を示したものを静特性(static characteristic)といいます。
動特性→過渡状態における要素の特性
静特性→定常状態における要素の特性
8.制御対象の信号関係
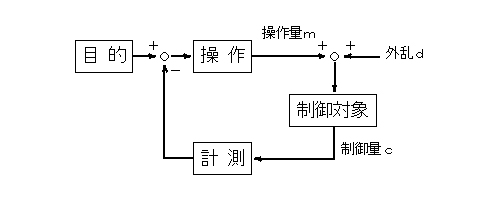
上図は、温度制御系の制御対象に入-出力される信号の関係です。操作量(m)、外乱(d)制御量(c)の間の相互関係で制御対象を知ることができます。
9.ステップ応答法
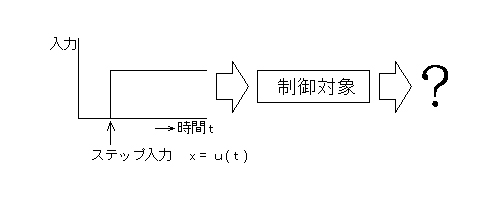
ある時間まで零で、その時刻からあとは他の一定値をとる入力をステップ入力(step input)と言い、ステップ入力による応答をステップ応答(step response)または、インディシャル応答(indicial response)と言います。
ステップ応答は、バネはかりに計量物を載せた時の指針の動き、電動機のスイッチを入れた時の速度の変化、電気炉の供給電圧を変えたときの温度の変化など、日常生活にも色々な例があります。
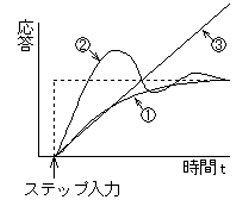
上図のステップ応答では、①のようにゆっくり応答をおこしてだんだんとおちつく形、②のように目標の値を行き過ぎたりもどり過ぎたりしながらだんだんとおちつく形(減衰振動)などがあり、③のように発散する応答を示すものもあります。
①、②のように十分時間がたてば、一定値におちつくものを自己平衡性があるといい、③のようにいつまでたっても応答がおちつかないものを自己平衡性がないと言います。
10.周波数応答法
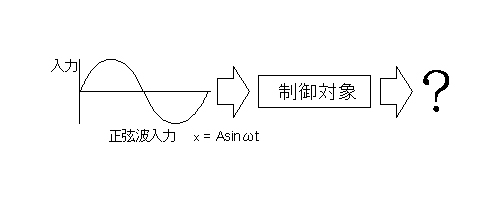
ある時間から振動的に交互に大きさが変化するような入力があります。たとえば、箱の中身に何が入っているのかな?と箱を振るときも振動的な入力を与えていることになりますし、バネで吊った物体の上下振動、未熟な人が自転車を運転しているときのハンドルの切り方のような入力の変化は三角関数のsinまたはcosであらわされます。この入力を正弦波入力(sinusoidal input)といい、正弦波入力による応答(出力)を周波数応答(frequency response)と言います。
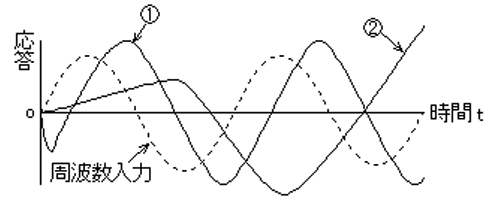
平衡状態(安定した状態)にある制御対象に、振幅が一定なAsinωtなる正弦波入力を与えた場合の応答は、上図に示す①のように、はじめは多少乱れても、入力の正弦波に近いもの、②のように発散するものがあります。このような正弦波入力に対する応答については、初期の過渡的な状態を無視して、ある程度時間がすぎた後の定常状態の波形に着目して理論的な解析を行います。
11.二次おくれ要素
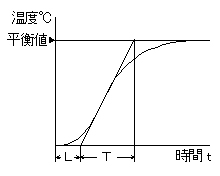
上図に示すように、制御対象からの応答,立ち上がりが遅くS字状の応答を描く性質のものを二次おくれ要素といいます。
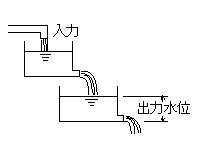
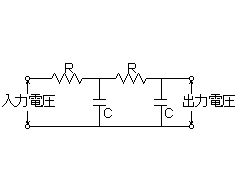
二次おくれの性質を持つ要素の例としては、上図に示すような2つの容量をもつ制御対象や電気回路などがあげられます。さらに容量の数が多くなってもS字形となることには変わりなく、また遅れが一層目立つことになり、これを高次おくれ要素といいます。一般に温度の変化は、高次おくれとなって検出されます。
二次おくれ、高次おくれはS字曲線の変曲点で接線を引き、これが時間軸と交わる点で、「むだ時間(L)」+「一次おくれ」の性質に近似して表すことができます。
12.むだ時間要素
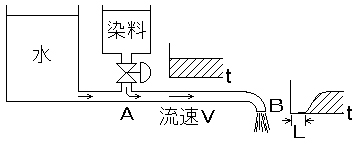
上図のように、A点で染料(入力)を加えた時、その応答(出力)はB点では(AB/流速V)時間だけおくれ、その間は全然応答があらわれません。すなわち入力信号がある時間Lだけおくれて伝わるような要素をむだ時間要素(dead time element)といい、おくれ時間Lをむだ時間(dead time)といいます。
むだ時間は、操作を加える点と検出点がある程度へだっているような場合にあらわれます。むだ時間が大きいほど、制御結果はハンチングやオーバ-シュートを起こしやすく、温度制御では出来る限りむだ時間を小さくする必要があります。
13.熱容量
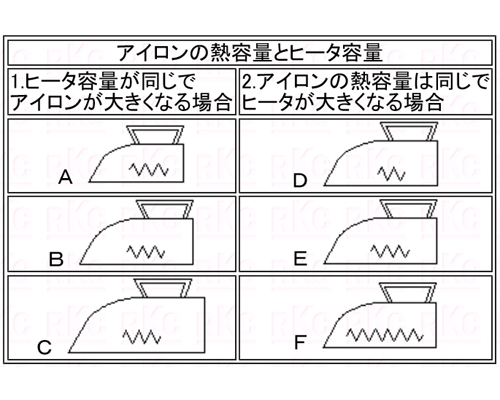
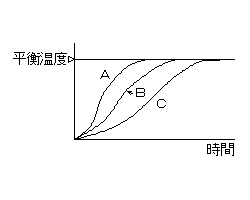
熱容量の違い
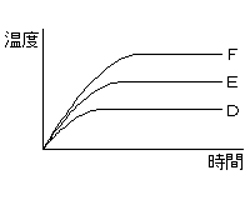
ヒータ容量の違い
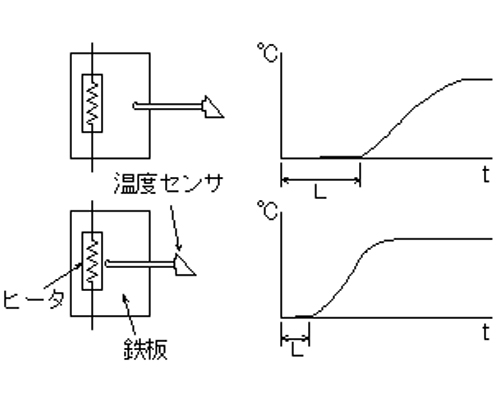
一般に加熱制御の対象は、ヒータ自身とヒータが加熱する物の2つに分けられます。ヒータの加熱する力の度合いを表すのが「ヒータ容量」であり、ヒータが加熱する物の熱的な大きさを表すのが「熱容量」です。
上図ではアイロンの加熱体積(熱板の体積)の大きさが熱容量になります。
ヒータ容量が同じで熱容量が大きいほど「一次おくれ」や「二次おくれ」の時定数は大きくなります。すなわち加熱応答が遅くなるわけです。
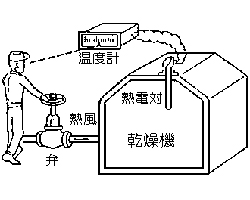
14.外 乱
安定な状態にあるものを乱そうとする外的作用を外乱(disturbance)といいます。
いま、一例として熱風によって一定温度に加熱する乾燥機を見てみましよう。この場合、弁を適当な開きにしておけば、一応温度を一定に保つという目的は達せられるはずです。しかし実際には、つぎにあげるような外乱が働いて温度を変化させます
1)外乱の原因
(1)品物を出し入れするために扉をひらく。
(2)乾燥機に入れる品物の温度・重量が変わる。
(3)湿っていた品物がしだいに乾いてくる。
(4)外気温度の変化によって乾燥機からの放熱量が変わる。
(5)送風機から送り出される熱風の温度が変わる。 etc..
2)外乱の改善
根本的には、前記の外的作用を取り除けば(外的作用を小さくする)良いわけですから、
(1)運転中に扉の開閉はしない。(扉を小さくする)
(2)洗濯物はよく脱水してから入れる。また、あまり一度に多量に入れない。
(新しい材料などは予熱などして使用する)
(3)熱風量を一定に保つ。(流量を制御する)
(4)ヒータ電源を一定に保つ。(定電圧にする)
どうしても上記のようなことが出来ない場合は、以下の方法があります。
(1)外乱の加わるタイミングが判る場合。
例えば、扉を開く場合、予め熱風の流量を一時的に増加すれば、温度低下は防げます。
(2)外乱の加わるタイミングが判らない場合。
この場合は、温度調節計で熱風の流量をコントロールする必要があります。