技術解説
制御性向上のために(ブリリアントPID制御編)
現在、弊社の製品に搭載されているPID制御方式は、大きく分けて2種類あります。
一つは、初めてデジタルPIDコントローラとして販売されて以来、今でも比較汎用製品に搭載されているARW式PID制御(アンチリセットワインドアップ式PID制御)です。
もう一つは、ブリリアントPIDと呼ばれる、高機能機種に搭載されている制御方式です。
それぞれのPID制御方式やオートチューニング結果から、より制御性を向上させるためにどのようなことを行えば良いかについて解説します。
ここでは、ブリリアントPID制御での制御性向上について解説します。
①ブリリアントPID制御のオートチューニングについて(エンハンストAT)
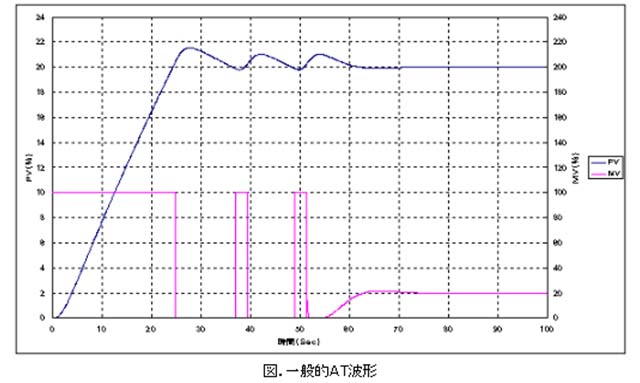
オートチューニング(AT)とは、制御したいもの(制御対象)にあったPID定数を自動的に求める機能で、ブリリアントPID搭載機種に用意されているのはエンハンストATと呼ばれるオートチューニングです。
動作としては、出力0-100%によるON/OFF制御での温度測定値(PV)の動きからPID定数を求めます。
本来ATは、制御が安定したときの出力値(負荷率)が50%になるような設定値(SV)で行われると、より正確なPID定数が算出できます。
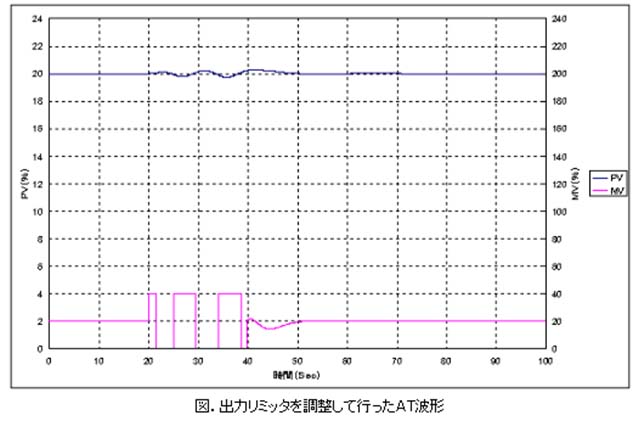
しかし、現実には負荷率50%となるようなSVを選べない場合が多く、このようなときには、負荷率が中心になるように出力リミッタ上下限値を設定してATを行うと、より正確なPID定数が求まります。
(例えば、負荷率20%の場合、出力リミッタ上限値を40%に設定すると良い)
ブリリアントPID制御搭載機種では、出力リミッタ上下限値の設定が可能で、エンハンストATのPID定数算出に際して出力リミッタの情報も加味しているため、出力リミッタを変更してのATが可能です。
※ ARW方式調節計では、出力リミッタを設定しオートチューニングを実行すると正確なPID定数が得られませんのでご注意願います。
この応用として、出力の急変(0-100%変動)が好ましくない制御対象に対してATを行いたいときも、負荷率を中心に数%~数十%の幅で出力を変動させてATを行うことができます。(例えば、負荷率20%のときに出力変動幅10%でATを行うには、出力リミッタ上限値に25%、同下限値に15%を設定すればよい)
但し、ATの際に設定した出力リミッタ上下限値は、実際に制御を行うときには元の値(出力リミッタ上限値:100%,出力リミッタ下限値:0%)に戻すのを忘れないように注意して下さい。
★ 一口メモ
0-100%でATを行った結果から、負荷率によりPID定数を補正するには積分時間(I),微分時間(D)を以下の値を目安に変更すると良い。
負荷率 20% → I,D:約20%減
負荷率 10% → I,D:約30%減
②SV変更時の応答とPID定数の関係について
SV変更によって出力が100%(又は0%)に飽和するような場合には、PID定数と出力の動きには次のような関係があります。
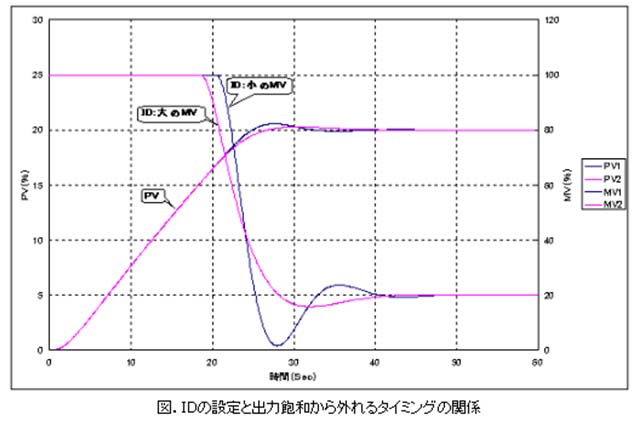
I,D → 出力が飽和から外れるタイミングを変えることができる
IDが大きいと出力が飽和から外れるのが速くなる
IDが小さいと出力が飽和から外れるのが遅くなる
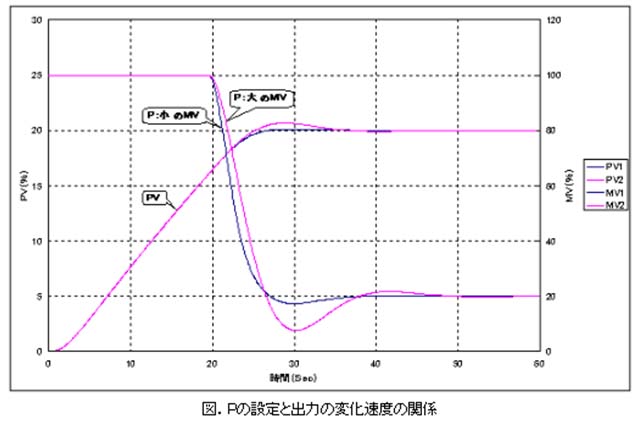
P → 出力が飽和から外れた後の出力の変化速度を変えることができる
Pが小さいと出力の変化速度が速くなる
Pが大きいと出力の変化速度が遅くなる
これらの関係から、SV変更によって出力が100%(又は0%)に飽和するような場合のPVの応答速度やオーバーシュート量(又はアンダーシュート量)には、次のような傾向が見られます。
ID :大 → オーバーシュート : 小 , 応答速度 : 遅い
ID :小 → オーバーシュート : 大 , 応答速度 : 速い
P :小 → オーバーシュート : 小 , 応答速度 : やや遅い
P :大 → オーバーシュート : 大 , 応答速度 : やや速い
SV変更により出力が飽和するような、大きなSV変更を行う場合に、応答速度を落とさずオーバーシュートを抑えるには、出力をなるべく長く飽和させておき、急激に出力を下げるようなチューニングを行えば良く、具体的には、P,IDを、それぞれ小さくする方向に修正します。
但し、あまり小さくしすぎると、PVが振動的になることがありますので、ご注意ください。