技術解説
フィードバック制御とフィードフォワード制御
1.フィードバック制御とは
PID制御を用いた調節計は、「温度」「流量」「圧力」・・・などを望んでいる値に自動的に制御する計器であることはご存じの事と思います。
では、調節計はどのような手順で自動調節を行っているのでしょうか?
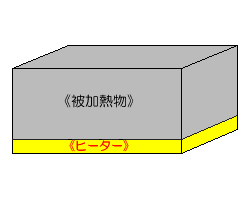
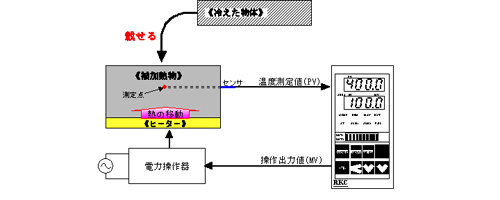
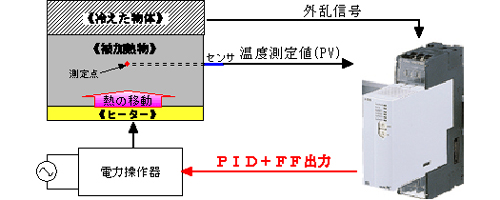
図1のような加熱ヒータ付きの「被加熱物」を「室温:T0」から「ある温度:Tset」に制御する場合を例に考えてみましょう。
温度制御の対象となる「被加熱物」を、以降では「制御対象」と呼ぶことにします。
制御対象の温度を測定するために内部に「温度センサ」を埋め込み、さらに、ヒータに電力を供給する「電力操作器」と「温度調節計」を用意して、図2のように接続し制御させることにします。
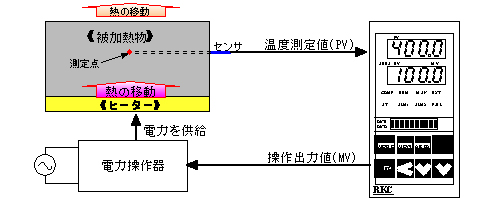
これにより温度調節計は、以下の(1)~(4)の手続きを繰り返して制御対象の温度を設定温度となるように制御を行います。
(1) 制御対象の温度:PVを測定し、「PVT」と「設定温度:Tset」との温度差を計算します。
(2) この温度差に応じて、ヒータに供給するべき電力量を計算し電力操作器に計算結果を出力します。
(3) 電力調整器は、温度調節計からの出力値に応じた電力をヒータに供給します。
(4) ヒータに電力が供給されることにより、制御対象の温度が変化します。
このような、 「温度の計測」 → 「制御演算」 → 「操作量(操作出力値)の出力」 → 「温度の変化」 → 「温度の計測」 → ・・・
という閉じたループにより制御を行いますが、この閉じたループを「閉ループ制御(closed loop control)」といい、閉ループを作り加えた操作量(操作出力値)の結果にあたる”温度変化”を帰還(feed back)して制御する方法を「フィードバック制御(FB制御)」と呼んでいます。
2.フィードバック制御の優れているところ
このようにフィードバック制御は、現在の温度状態を検出してから出力量を決定するという方法で制御を行いますので、例えば
•制御対象に急に風が当たる
•制御対象の性質が多少変化する
など、制御を乱すような外的な作用(外乱)が生じても、その影響が温度変化として現れれば、ただちにフィードバックされて適切に修正するように動作することができます。
また、閉ループ内に含まれる調節計の設定をうまく行うことで制御対象の設定温度に対する応答特性を改善することも可能です。
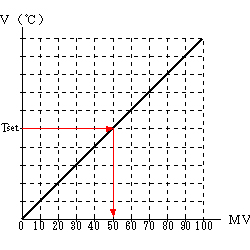
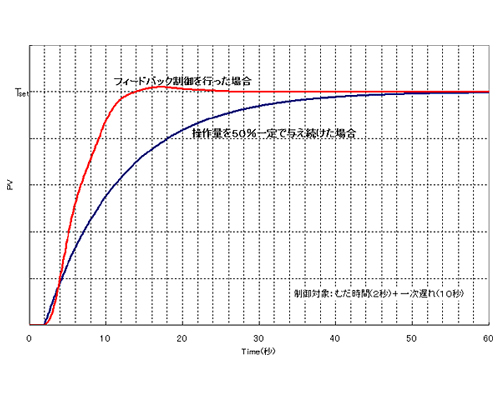
たとえば、制御対象の電力供給量に対する温度の特性が図3の関係で与えられていた場合、制御対象の温度をTsetにするためには50%の操作量を与えれていれば実現できることが判ります。
(図4の青いデータ)
この制御対象に対してフィードバック制御をした場合はどうでしょうか?
図4の赤いデータのように、「応答の速度」および「Tsetに到達するまでの時間」が共に改善されていることが確認いただけると思います。
3.フィードバック制御の限界
このようにとても優れているフィードバック制御ですが、残念ながら欠点もあります。
フィードバック制御は、その名の通り「与えた操作量の結果を見て(フィードバックして)から修正」するため、制御を乱す様々な外的要因が発生しても、その影響が現れてからでなければ修正を行えません。
”風が吹いてきた”または”制御対象の性質に変化が生じた”などの外的要因が生じても、それにより温度変化が生じなければ修正することができないということになります。
そのため、修正動作が後追いとなってしまうので、外的要因が生じると必ずその影響を受けてしまうことになります。
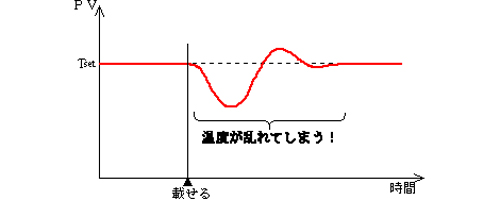
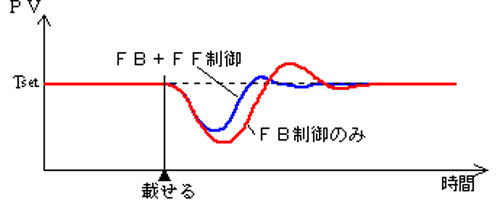
例えば、先ほどの”被加熱物”を制御する例で、設定温度Tset に良好にフィードバック制御しているときに、”別の冷えた物体”を載せたらどうなるでしょうか?(図5)
当然、載せた直後は測定点の温度変化は生じません。
しかし、時間の経過と共に”載せた物体”の影響により温度が下がってくるはずです。
フィードバック制御では、”この温度の低下”を検出してからでないと修正動作が行えないので、結果として大きく制御が乱れることになります。(図6)
4.フィードフォワード制御(FF制御)
フィードバック制御の欠点を補うために用いられるのがフィードフォワード制御と呼ばれる制御方式です。
フィードフォワード制御は、制御を乱す外的要因が発生した場合に、それが”温度の乱れ”などの影響として現れる前に、前もってその影響を極力なくすように必要な修正動作を行う制御方式になります。
図7に基本的な概念図を示します。
図7からわかるように”フィードフォワード制御”は、”フィードバック制御”とは異なり信号の流れが閉ループになっていない、「外乱の検知」→「操作量の決定」という一方向の制御方式であることがご理解いただけると思います。
このため、フィードフォワード制御だけでは設定温度に収束させる事ができないので、通常はフィードバック制御と併用します。
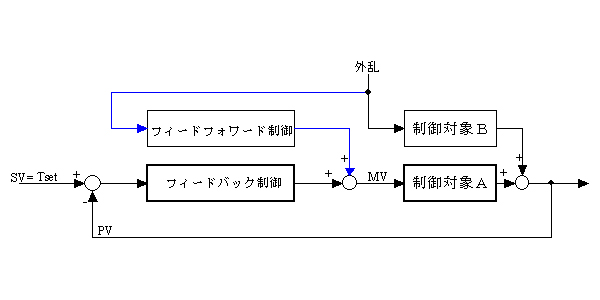
•制御対象A:ヒータから温度センサまでの応答特性.
•制御対象B:外乱要因から温度センサまでの応答特性.
5.フィードフォワード制御を行うためには
フィードフォワード制御は、外乱などによる影響が現れる前に、前もってその影響を極力抑えるように修正動作を行う制御方式であるため、
(a)外乱を事前に検知する手段
(b)外乱検知時の適切な修正量の決定
が必要となります。
(a) の「外乱を事前に検知する手段」は、シーケンス的な処理により生じる外乱であれば検知することができると思われます。
(b) の「外乱検知時の適切な修正量」は、”どういう外乱”が入力され、その結果”どのような影響が現れるか”を把握し、この影響を抑えるためにはどのような修正量が適切かを検討して決定します。
前の例で言い換えると、”風が吹いてきた”という外乱なのか、または、”制御対象の性質に変化が生じた”ことによる外乱なのかを把握し、さらに、この外乱の影響がどういうメカニズムで制御を乱すかを解析した上で適切な修正量の決定を行います。
6.フィードフォワード制御の適応例
電源電圧変動に対するフィードフォワード
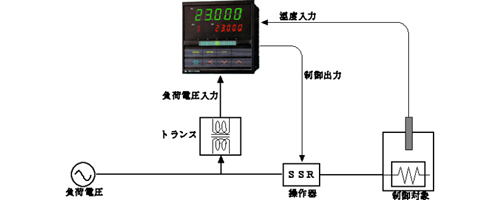
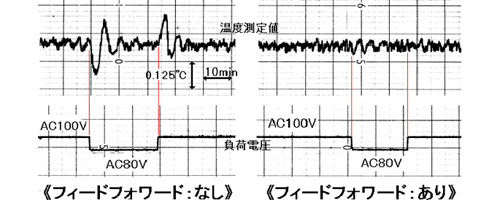
フィードフォワード制御の例として、「電源電圧変動に対する供給負荷電力フィードフォワード」の例を示します。
(a)外乱の事前検知:負荷電圧入力の変動量で検知
(b)外乱時の修正量:電圧変動量から計算される負荷電力変動量
この例の場合のフィードフォワード補償は、負荷電圧の変動により負荷への供給電力量が変化してしまうことで生じる”温度の乱れ”を抑制するために、負荷電圧値を監視して電圧変動分の電力換算値をPID制御演算値に加算することで制御性の向上をはかっています。
図9に当社試験装置を用いた電源電圧フィードフォワードの試験結果を紹介します。
この例の場合のフィードフォワード補償は、負荷電圧の変動により負荷への供給電力量が変化してしまうことで生じる”温度の乱れ”を抑制するために、負荷電圧値を監視して電圧変動分の電力換算値をPID制御演算値に加算することで制御性の向上をはかっています。
図9に当社試験装置を用いた電源電圧フィードフォワードの試験結果を紹介します。
なお、この機能は「高分解能温度調節計:REX-F9000」に搭載されています。
既知外乱に対するフィードフォワード
前項3で示した、被加熱物をフィードバック制御している状況で別の「冷えた物体」を載せる例において、外乱(冷えた物体が載る)の発生が事前に検知できる場合を考えます。
この場合、「被加熱物」に「別の物体」が結合されて、制御対象の特性が変化してしまう外乱の ため、外乱の温度変化に対する影響については伝熱的な解析が必要になりますが、この解析によ り適切な修正量の算出ができればフィードバック制御だけの場合よりも良好な制御結果となるこ とが期待できます。
7.おわりに
フィードバック制御とフィードフォワード制御のそれぞれの長所、短所をご理解いただけたでしょうか?
当社の調節計のほとんどがフィードバック制御用の調節計です。
そのため、通常は前記のような制御を乱す外的要因に対しては、フィードバック制御だけで制御の乱れを極力抑えるようにPID定数を調整して対応します。
一般的にPID制御では、比例帯を狭く設定することで外乱入力に対する制御の乱れを抑制します。
なお、あまり比例帯を狭く設定しすぎると「制御応答が振動的」になりますので注意が必要です。
また、PID定数の調整だけでは希望するように外乱の影響を除去できない場合には、SRXシリーズ Z-1082仕様に搭載のフィードフォワード機能をお試しください。
SRXシリーズ(Z-1082)は、フィードフォワード修正量を自動チューニングする機能が搭載されておりますので、比較的簡単にフィードフォワード制御を付加した計装が可能です。