技術解説
ポストチューニング機能について
PIDのチューニングにお困りの方へ
熱処理プロセスには様々な要求があります。オートチューニング(AT)の後でも、
… 『もう少し応答を速くしたい』、
… 『オーバーシュートを抑えたい』
という要求が生じることも有るかもしれません。
このような場合、通常は多くの時間や労力を費やしてPID定数を微調整することとなりますが、調整方法は簡単ではありません。
そこで、このような状況により良く対応できるように、簡単な新しい調整方法を提案いたします。
1.PID定数の調整方法および問題
熱処理プロセスの要求に応じて、適切なPID定数を設定する必要がある場合、「セルフチューニング(ST)」と「オートチューニング(AT)」という方法を一般に用いられると思います。
これらの方法は、応答速度とオーバーショートに対して両方を考慮したバランスの取れたPID定数が設定されますが、さらにより良く、 たとえば…
「もう少し応答速度を速くしたい」
あるいは
「もうちょっとオーバーシュートを抑えたい」
といった場合には、PID定数を個別に調整していく必要が生じます。
2.問題解決方法
希望する応答特性を得るには、P、I、Dの各パラメータを同時に調整する必要があります。 しかしながら、これらのパラメータはお互いに影響しあい簡単には調整できません。
このような時は、ポストチューニング(PT)機能をお試しください。
ポストチューニング(PT)機能は、応答特性の特長量に着目し「感覚的に」かつ「簡単に」PID定数を調整できる機能になります。
図1にその概念図を示します。
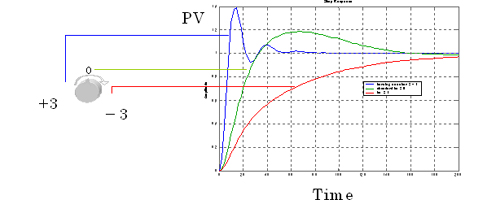
・つまみを「+方向」にまわすと、応答速度は速くなる … 青い線
・つまみを「-方向」にまわすと、応答速度は遅くなり … 赤い線
お客様が操作するのは『つまみ1つのみ』です。
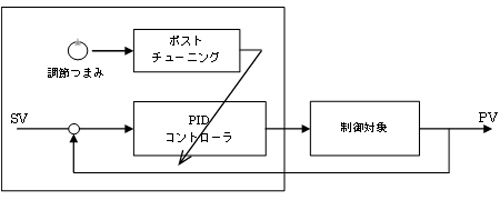
ポストチューニング(PT)機能は、つまみの値に応じて自動的にPID定数を適切に調整して希望の応答特性を実現します。
図2にその概念図を示します。
3.使用例
ポストチューニングは絶対的な調整ではなく、相対的な調整方法です。
調節計に設定してあるPID定数(AT算出値や出荷初期値など)の応答特性を基準として
『より応答を速くしたい』、『より応答を遅くしたい』、『オーバーシュートを抑えたい』などの調整を、つまみ1つで実現します。具体的に以下の使用例で説明します。
1)現状の応答を少し変更したい
ATで求めたPID定数で制御を行ったが「応答速度をもう少し速くしたい」あるいは「応答速度をもう少し遅くしたい」という場合は、以下のように操作します。(図3参照)
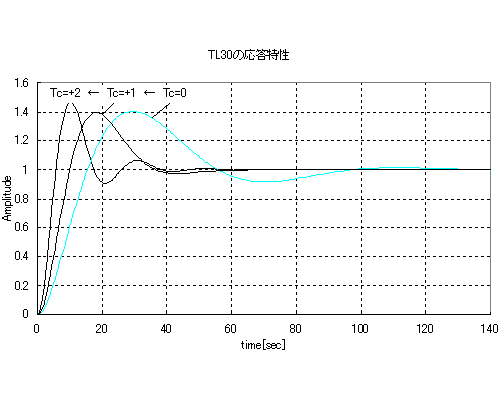
・応答速度を速くする … 「プラス方向」に調整
・応答速度を遅くする … 「マイナス方向」に調整
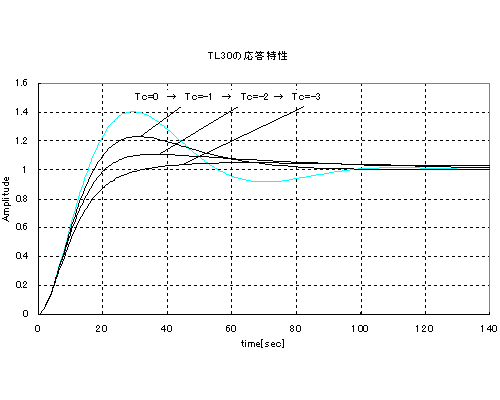
2)オーバーシュートを抑えたい
オーバーシュートを抑えたい場合にも、ポストチューニング機能は有効です。
ポストチューニングキーを「マイナス方向」に調節すれば、オーバーシュートを小さくすることが出来ます。
図4を参照してください。
4.制限条件
ポストチューニング機能は、PID定数の設定値自体は変更しません。
また、設定されているPID定数で得られる制御応答に対して、応答速度またはオーバーシュート量の改善を行うので、改善効果はPID定数の設定に依存します。
以下にポストチューニング機能の制約について示します。
(1)制御応答の改善効果は、設定されているPID定数に依存します
設定されているPID定数が不適切な値である場合は、十分な効果が得られない場合もあります。
(2)過度な調整を行うと、振動的になる場合があります
設定されているPID定数が応答速度を向上できる限界値に近い場合、ポストチューニングの調整を「プラス方向」に調整すると、振動的な応答となる場合があります。
(3)P制御、PI制御、PD制御では、ポストチューニングは機能しません
ポストチューニング機能は、誰でも簡単な操作で制御応答を変更できる機能です。
一方、ポストチューニング機能は万能ではなく、制限もあります。この短所に留意してご利用いただければ、今までより作業効率向上に貢献できると考えます。
ポストチューニング機能は、温度調節計 RBシリーズに搭載されています。