技術解説
電力制御の方式と特徴について
1.はじめに
温度制御システムを構成する場合、温度センサ、温度調節計、電力操作器というアイテムが最低限必要になります。下図に、その基本システムを示します。
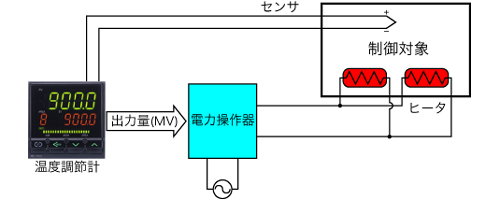
今回は、特に電力操作器について、その動作原理、使用上の留意点等について、温度制御的な視点や、消費電力等に着目して、ご説明したいと思います。
2.電力操作器の種類と使用上の留意点
一口に電力操作器といっても、その種類は、簡単なマグネットリレーから、インバータといった複雑な電子回路のものまで、多岐に及びます、ここでは、主にヒータを熱源としたシステムとして、次に挙げるものを対象にします。
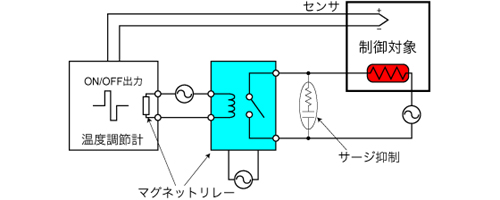
1)マグネットリレーの特徴
マグネットリレーの特徴は、以下の通りです。
<メリット>
・機械接点を持ち、比較的大電流でも開閉できる。
・接点抵抗が小さく、大電流で電力損失が少ない。
回路構成がシンプルで、ローコスト。
<問題点>
・電磁誘導を利用するため、接点が動作するまでの時間がかかる。
・ゼロクロス(後に説明)動作ができないため、ノイズが大きくなる。
機械式接点のため、有限寿命の素子もある。そのため、出力周期を長くして、接点の寿命を延ばす必要があり、応答の速い制御系には適さない場合がある。
という面があります。
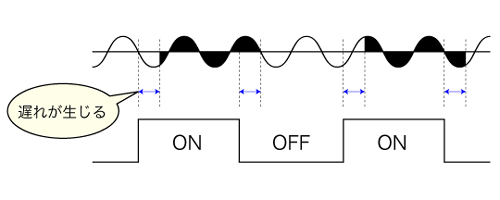
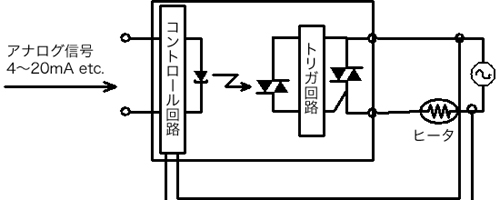
2)ゼロクロスSSR(ソリッドステートリレー)
マグネットリレーに対して、SSRを用いると、半導体スイッチの高速動作を利用して、ゼロクロス動作を行うことができます。
ゼロクロス動作の特徴は、以下の通りです。
<メリット>
・抵抗負荷の場合、常に、ON、OFF動作を、電圧のゼロ電圧付近で行う。
・そのため、電流の急激な変化が少なく、開閉の際のノイズが少ない。
・全波制御では、高調波電流もほとんど生じない。
<問題点>
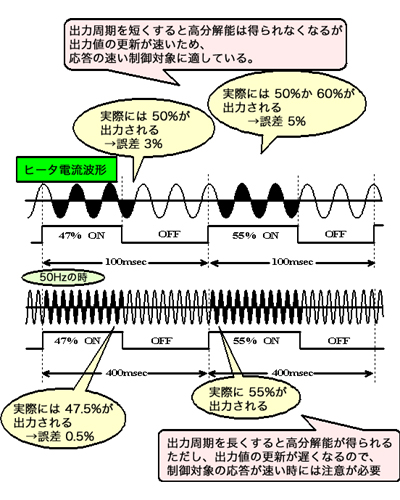
・出力周期を0.1secとすると、出力値の更新が速くなるが、電源周波数が50Hzにおいて、分解能が1/10になってしまう。
・出力周期を10secとすると、出力の更新周期が遅くなるが、電源周波数が50Hzにおいて、分解能が1/1000に高まる。
・出力周期を適切に設定しないと、場合によっては、制御点の温度にリプル(脈動)が生じてしまう恐れがある。
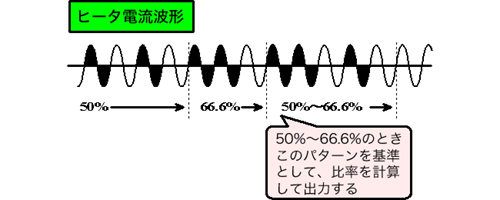
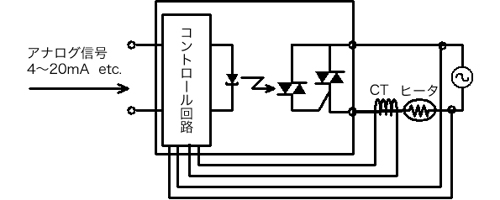
3)連続比例型ゼロクロスSSR(ソリッドステートリレー)
ゼロクロス型SSRに、さらに、連続的な出力量を実現する方式が、連続比例型SSRです。ゼロクロス型SSRに比べて内部回路が複雑になりますが、以下のメリットがあります。
<メリット>
・一般的なゼロクロスSSRと比較し、連続したなめらかな電力制御になる。
・高調波電流がほぼゼロになるため、制御性も求められる用途や高調波電流が生じると問題になるケースでは、近年、多用されている方式です。
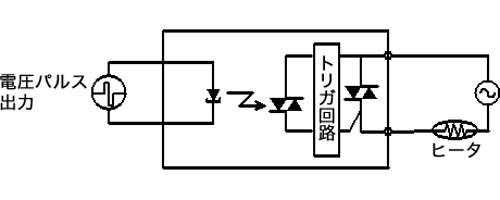
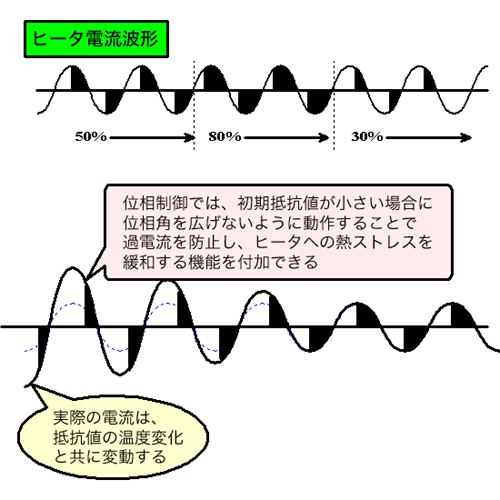
4)位相制御器
ゼロクロスSSRに対し、半サイクル毎に、導通角を調整して、電力を連続的に制御する方式が位相制御です。(“位相制御で発生する高調波電流と高周波ノイズについて”技術解説参照)
その特徴は、
<メリット>
・電力量をほぼ連続的に制御できる。
・内部演算により、出力量と電力量を比例させることができる。(電力リニアドライブ)
・電流を半波ごとに制限できるため、より、高速な電流制限が行え、常温で抵抗値が低いヒータエレメントを使用した加熱器等による突入電流を制限することができる。(回路が対応している場合に可能)
この方式は、特に、高速な応答をする熱負荷(ランプヒータなど)において効果を発揮します。
ただし、制御性が最も優れていますが、回路が複雑で、比較的高価であり、高周波ノイズや高調波電流を発生し、問題になるケースがあります。
3.SSRの電力損失について
SSR、位相制御器には、開閉素子として、サイリスタやトライアック等の半導体が用いられています。この素子の、出力特性は、ダイオード性でON時の順電圧に比例して、電力損失が発生します。
この順電圧は、ヒータの電源電圧に関わらず、ほぼ一定ですので、ヒータの平均電流が大きいほど電力損失が大きくなります。
ヒータのエレメントは、素材により異なりますが、低抵抗ヒータの場合は、AC20V程度の電源電圧でドライブが必要になる場合があります。
そこで、それぞれAC20V、AC100V、AC200V定格の1kWヒータを負荷率100%(全ON)でドライブしている場合の素子の電力損失を比較表にしました。
| 電源電圧 | ヒータ電流実効値 | 電力損失 | ドライブ効率 |
| AC20V | 50A | 58.5W | 94.2% |
| AC100V | 10A | 11.7W | 98.8% |
| AC200V | 5A | 5.9W | 99.4% |
*トライアックの電圧降下を1.3V一定とした。
*ゼロクロスSSRでは、損失が負荷率に比例して発生するので、負荷率50%では、損失がほぼ半分になるという目安になる。
このように、低電圧で電力制御を行う場合は、半導体素子をサイリスタやトライアックにすると、電力損失が大きくなるため、FETなどの低抵抗性素子を用いて、電力損失を低減しないと、発熱が多くなり、結果的に放熱器が大きくなるといった問題が生じます。
4.まとめ
ご説明したように、電力制御の方式は、それぞれに特徴があり、その装置にフィットしたユニットを選択しないと、
・温度制御が目標のスペックに入らない。
・コストが増大してしまう。
・サイズが大きくなってしまう。
・電力損失が大きくなってしまう。
・ヒータに、電気的ストレスを与えてしまう。
などの、問題が生じます。
従って、最適なシステムを実現するためには、
・特に、制御対象の応答が速い場合、電力制御器の入出力応答に注意して、機器を選定する必要がある。
・負荷特性の温度依存性を考慮して、電力制御方式を選択する。
・低電圧用ヒータでは、電力制御器の電力損失を算出し、発熱に注意する。
・位相制御器を使用する場合は、高調波電流や、発生ノイズに注意し、必要に応じて、ノイズフィルタ等で対策する必要がある。
などの措置が必要になります。